فهرست مطالب
محققان به تازگی با استفاده از روش اوریگامی ژاپنی (تا کردن کاغذ)، رباتهای تغییر شکلدهندهای را ساختند.
به گزارش تکناک، یک تیم تحقیقاتی در دانشگاه ایالتی کارولینای شمالی (NC State) روشی را طراحی کردهاند، که تنها سه موتور فعال را قادر میسازد تا یک ساختار مکعبی پلاستیکی را به بیش از 1000 شکل مختلف تغییر دهند.
مهندسان بر این باور هستند که این اکتشافات ممکن است باعث ایجاد سیستمهای مصنوعی شود که میتوانند شکل خود را تغییر دهند و بارهای مختلف را تحمل کنند، که از جمله آن میتوان به ساختارهای رباتیک سازگار برای استفاده در فضا اشاره کرد.
جی یین، یکی از اعضای تیم تحقیقاتی گفت: «ما از یک مفهوم سلسله مراتبی مشاهده شده در طبیعت استفاده کردیم، مانند رشتههای ماهیچهای لایهای، اما آنها را به مکعبهای پلاستیکی که برای ایجاد یک ربات تغییر شکلدهنده است، تغییر دادیم.»
01
از 02فراساختارهای جدید اوریگامی مدولار
برای اینکه سیستمهای بیولوژیکی و مصنوعی، امکان انطباق با زمینههای مختلف را فراهم کنند، باید قابلیتهای شکلدهی چندمنظوره داشته باشند. به عنوان مثال، اختاپوس مقلد قادر است در سریعترین زمان به اشکال مختلف تبدیل شود.
استراتژیهایی مانند پرتوها، ساختارهای اوریگامی و رباتهای قابل تنظیم مجدد، امکان شکلدهی را در سیستمهای مصنوعی فراهم میکنند، اما آنها محدودیتهایی مانند فعالسازی پیچیده و کاربرد محدود نیز دارند.
به گفته محققان، علیرغم پیشرفتهای قابل توجه، سیستمهای مصنوعی هنوز نتوانستهاند با تنوع و کارایی همتایان بیولوژیکی خود مطابقت داشته باشند. کلید آن شکل دادن، تطبیقپذیری تحرک و درجات آزادی (DOF) است.
اصلاح شکل در ساختارهای اوریگامی سفت معمولی به دلیل درجه آزادی منفرد (DOF) محدود شده است. این تیم تحقیقاتی تأکید میکند که فراساختارهای اوریگامی مدولار، که به سیستمهای تحریک پیچیده نیاز دارند و به دلیل ماژولهای چندوجهی خود، تحرک بالاتر را امکانپذیر میکنند، نمونهای از پیشرفتهای اخیر هستند.
این محققان یک معماری سلسله مراتبی از فرآیندهای حلقه بسته فضایی را به عنوان راهحلی برای این مشکلات پیشنهاد کردند. این سیستمها با جایگزینی سازههای انعطافپذیر و چند سطحی به جای اتصالات غیرقابل انعطاف، امکان توسعه طیف وسیعی از ساختارهای بزرگ قابل تنظیم مجدد را با گزینههای طراحی بینهایت میدهند، که تعادلی بین کارایی و تنوع ایجاد کند.
02
از 02رباتهای همه کاره تغییر شکلدهنده
هدف این پروژه دستیابی به انواع اشکال همهکاره ربات با استفاده از کمترین تعداد محرک برای قدرت تغییر شکل بود.
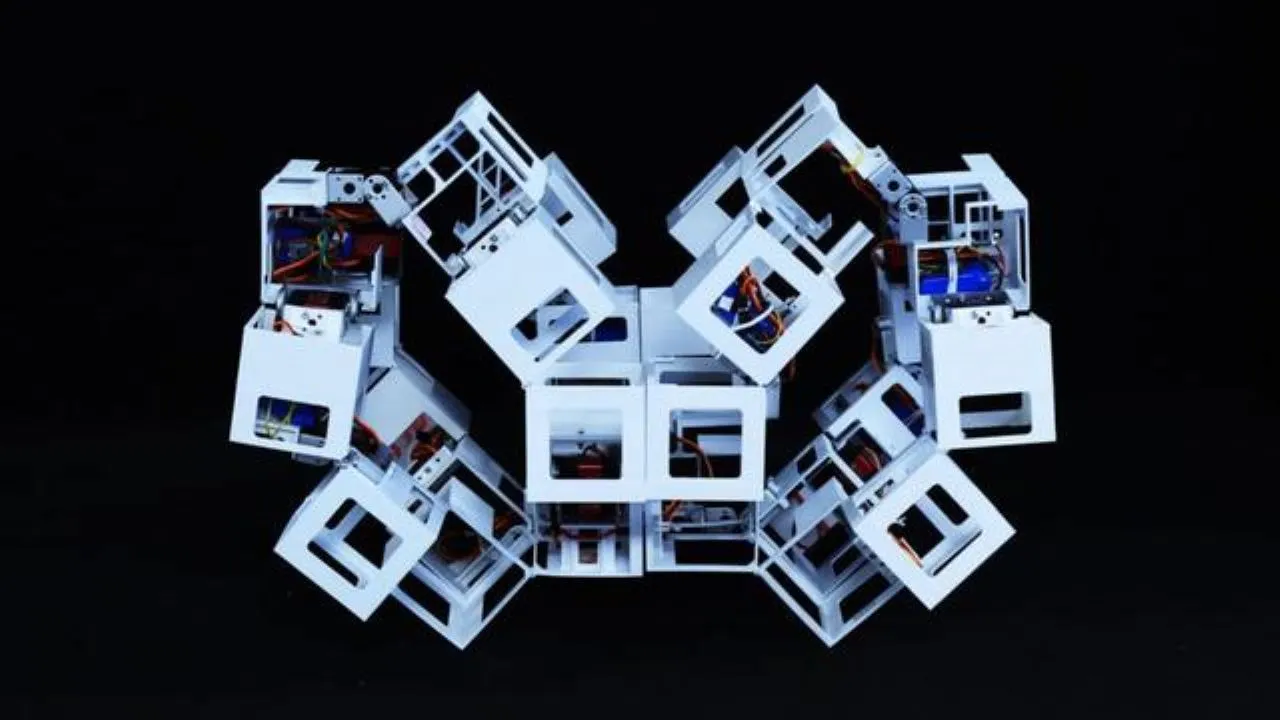
محققان با استفاده از یک چاپگر سهبعدی، 36 مکعب پلاستیکی توخالی با لولاهای چرخان را جمعآوری کردند. برخی از لولاها با پینهای فلزی محکم شده بودند، در حالی که برخی دیگر به صورت بیسیم توسط یک موتور روشن میشدند.
تنها با سه موتور فعال، محققان توانستند مکعبها را در بیش از 1000 پیکربندی مختلف تغییر مکان دهند. این اشکال شامل ساختمانهای چند طبقه، سازههای پلمانند و سازههای تونلمانند بود.
رباتهای تغییر شکلدهنده بدون اتصال فقط باید شیوه تغییر شکل سازه را دستکاری کنند تا بدون نیاز به پا به جلو، عقب و به طرفین حرکت کنند.
به گفته این تیم تحقیقاتی، رباتها ممکن است به سرعت تغییر شکل دهند و از حالت صاف یا باز به یک مکعب بزرگتر تبدیل شوند که شبیه یک جعبه یا بسته است. علاوه بر این، رباتها میتوانند سه برابر وزن خود را بلند کنند.
هدف محققان تقویت بیشتر رباتهای تغییر شکلدهنده است. آنها اکنون به دنبال ایجاد ساختاری مستحکمتر با قابلیت تحمل بارهای بزرگتر هستند.
آنتونیو دی لالو، یکی از محققان این مطالعه تصریح کرد: «ما فکر میکنیم که این ساختارها میتوانند به عنوان رباتها و محل زندگیهای فضایی قابل استفاده، پیادهسازی و پیکربندی شوند. این ساختار قطعات جداپذیر دارد، بنابراین میتوانید آن را به صورت تخته به فضا ارسال و به عنوان پناهگاه یا محل زندگی مونتاژ کرد.»