
یک یوتیوبر با قطعات لگو، آهنربا و یک ترانزیستور، موتور الکتریکی سادهای ساخت که بدون کنترلر دیجیتال بهصورت خودزمانبندی کار میکند.
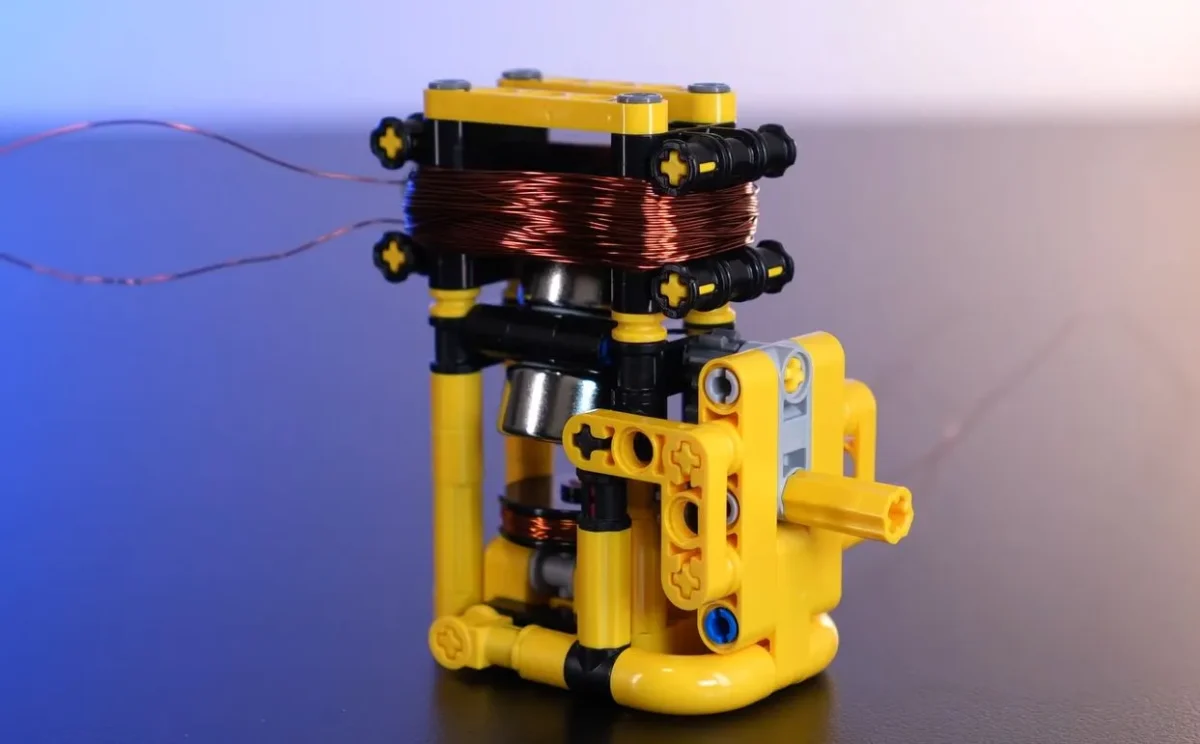
به گزارش سرویس فناوری تکناک، جیمی از کانال یوتیوب Jamie’s Brick Jams، این موتور الکتریکی کاملاً کاربردی را با استفاده از قطعات لگو، آهنرباهای نئودیمیومی، سیم مسی، یک ترانزیستور و یک باتری ۹ ولتی طراحی و مونتاژ کرد.
او در این پروژه، هیچ ماژول آماده موتور، هیچ کنترلکننده سرعت دیجیتال و هیچ کموتاتور مکانیکی را به کار نبرد. این سامانه، با یک مدار بسیار ساده و زمانبندی خودکار، حرکت چرخشی پایدار تولید میکند.
جیمی در توضیح این طرح اعلام کرد که این موتور، فاقد هرگونه میکروکنترلر و سامانه کنترلی پیشرفته است. او هدف خود را بازگشت به اصول بنیادین فیزیک عنوان کرد. او با این پروژه نشان داد که موتورهای الکتریکی مدرن، با وجود ظاهر پیچیده، بر پایه مفاهیمی ساده بنا شدهاند.
ساختار موتور از یک روتور آغاز میشود. روتور، بخش چرخان سامانه است. جیمی دو آهنربای نئودیمیومی به ابعاد ۲۰ در ۱۰ میلیمتر را در دو سوی یک محور نصب کرد. او آهنرباها را با دقت متعادل کرد تا چرخش بدون لرزش انجام شود. او برای تثبیت موقت قطعات در مرحله آزمایش، مقدار کمی چسب استفاده کرد.
بخوانید: این موتور الکتریکی ۱۰۰۰ اسببخاری فقط ۱۲ کیلوگرم وزن دارد
در کنار روتور، یک سیمپیچ محرک قرار دارد. جیمی حدود ۱۵۰ دور سیم مسی با ضخامت ۲۷ گیج را به صورت دستی روی یک قالب ساختهشده از قطعات لگو پیچید. زمانی که جریان الکتریکی از این سیمپیچ عبور میکند، میدان مغناطیسی تولید میشود. این میدان مغناطیسی، با آهنرباهای روتور برهمکنش میکند و نیروی لازم برای چرخش را ایجاد میکند.
موتور، با یک پالس اولیه از باتری ۹ ولتی آغاز به حرکت میکند. با این حال، یک پالس به تنهایی نمیتواند چرخش را ادامه دهد. تکانه پس از چند ثانیه کاهش مییابد و روتور متوقف میشود. چالش اصلی در چنین موتور سادهای، زمانبندی دقیق اعمال نیرو است. اگر پالس در زمان نامناسب ارسال شود، حرکت مختل میشود.
برای مطالعه: نخستین موتور الکتریکی بدون فلز جهان ساخته شد
جیمی برای حل این مشکل، یک سیمپیچ دوم را به عنوان حسگر به مدار اضافه کرد. این سیمپیچ حسگر، شامل حدود ۱۰۰ دور سیم نازکتر ۳۲ گیج است. زمانی که آهنربای روتور از مقابل آن عبور میکند، جریان بسیار کوچکی در آن القا میشود. این سیگنال کوچک، وارد یک مدار ساده شامل یک ترانزیستور TIP31C و یک LED اختیاری میشود.
ترانزیستور در این مدار نقش کلید خودکار را ایفا میکند. زمانی که سیگنال سیمپیچ حسگر دریافت میشود، ترانزیستور برای مدت کوتاهی فعال میشود و پالس کوتاهی از باتری را به سیمپیچ محرک ارسال میکند. این پالس، روتور را دقیقاً در لحظه مناسب هل میدهد. چرخه تشخیص، ارسال پالس و ایجاد نیروی مغناطیسی، به صورت مداوم تکرار میشود و چرخش پایدار را حفظ میکند. LED نیز با هر پالس روشن میشود و صحت عملکرد زمانبندی را نشان میدهد.
جیمی تأکید کرد که قطبیت سیمپیچها اهمیت دارد. اگر کاربر اتصالات یکی از سیمپیچها را معکوس کند، موتور ممکن است به درستی نچرخد. کاربر با جابهجایی سیمها معمولاً عملکرد صحیح را بازمیگرداند.
در سادهترین نسخه با دو آهنربا، موتور پیش از استفاده از چرخدندهها به سرعت حدود ۱۳۰۰ دور در دقیقه میرسد. جیمی با افزودن یک سامانه کاهش سرعت ۳ به ۱، سرعت خروجی را کاهش داد اما گشتاور را به طور قابل توجهی افزایش داد. او با استفاده از چرخدندههای لگویی، یک تسمه انتقال نیرو و حتی یک سامانه فرمان قدیمی از مجموعههای دهه ۱۹۹۰ لگو، توانست یک خودروی کوچک لگویی را روی سطح حرکت دهد.
او در آزمایشهای بعدی، روتور را ارتقا داد و هشت آهنربا را روی یک دیسک نصب کرد. او در این پیکربندی نیز همان سیمپیچها را استفاده کرد. در این حالت، سرعت چرخش به حدود ۴۸۰ دور در دقیقه کاهش یافت. در مقابل، گشتاور افزایش چشمگیری پیدا کرد و حرکت نرمتر شد. عبور مکرر آهنرباها از مقابل سیمپیچ حسگر، پالسهای سریعتر و یکنواختتری ایجاد کرد و نیروی پایدارتر تولید شد.
این پروژه در نگاه نخست ممکن است یک سرگرمی ساده به نظر برسد. با این حال، اهمیت آن در شفافسازی عملکرد موتورهای الکتریکی نهفته است. موتورهای الکتریکی، بخش بزرگی از زیرساخت صنعتی و خانگی جهان را تغذیه میکنند. بسیاری از کاربران هرگز سازوکار درونی آنها را مشاهده نمیکنند.
جیمی با ساخت این موتور از قطعات قابل مشاهده و ساده، مفاهیم الکترومغناطیس، زمانبندی و بازخورد را به شکل عینی نمایش داد. این پروژه نشان میدهد که اصول بنیادین مهندسی الکتریکی را میتوان بدون تجهیزات پیچیده و تنها با درک صحیح فیزیک پایه پیادهسازی کرد.




















