فهرست مطالب
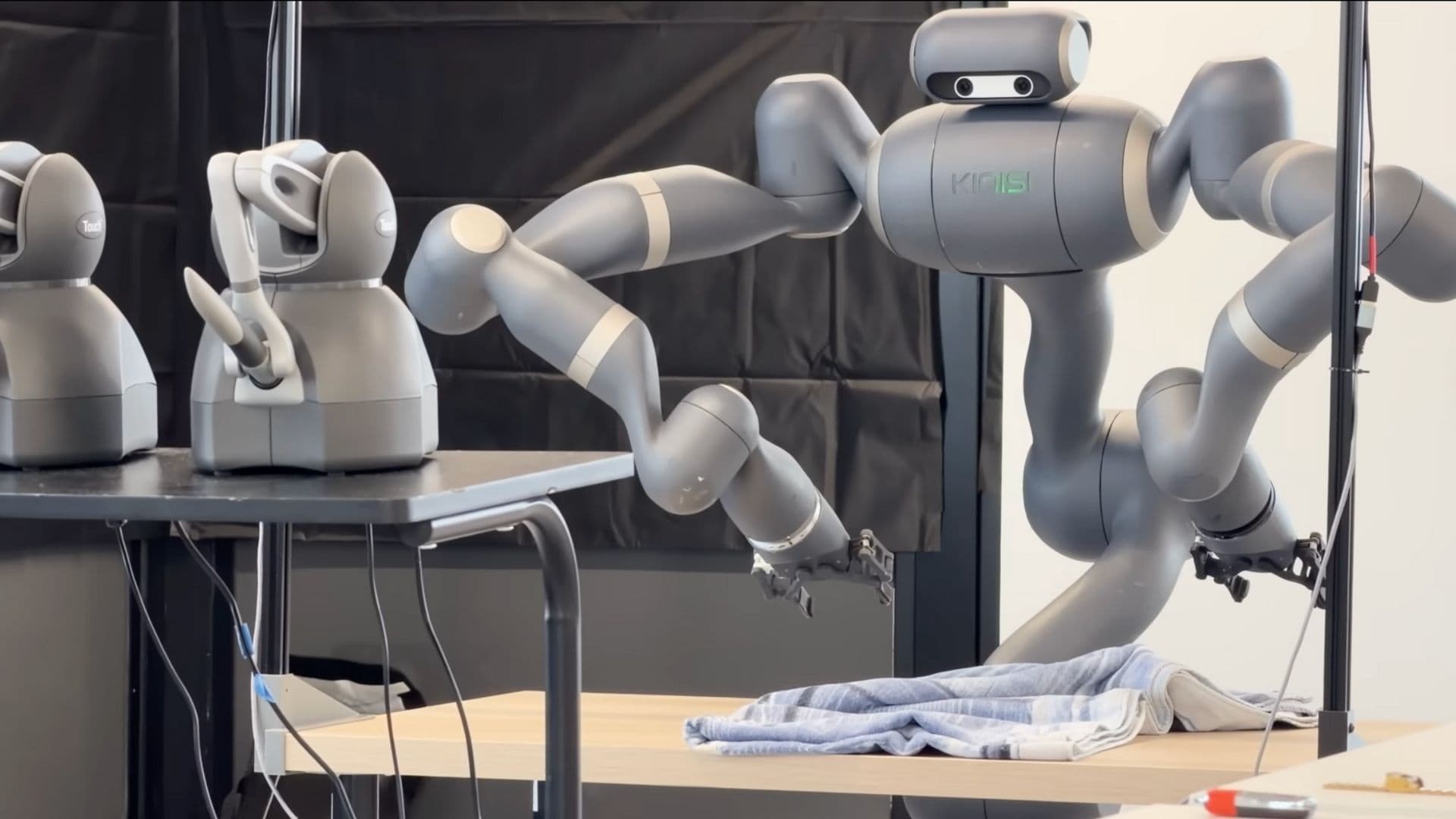
استارتآپ آمریکایی کینسی رباتیکس هفته گذشته ویدیویی منتشر کرد که ربات انساننمای KR-1 با موفقیت فرایند تا کردن یک حوله را به صورت کاملا خودمختار به نمایش میگذارد.
به گزارش سرویس رباتیک تکناک، در این آزمایش، ربات KR-1 حوله را از موقعیتهای تصادفی روی میز برمیدارد و همانند انسان، آن را با دقت تا میکند. این ربات با بهرهگیری همزمان از ادراک محیطی، برنامهریزی حرکتی و دستکاری ماهرانه، توانست این وظیفه را به شکلی منظم، دقیق و قابل تکرار انجام دهد. هدف اصلی آزمایش، اثبات این نکته بود که آموزش جنبشی برای کار با اشیای نرم و تغییرپذیر، جایگزینی کارآمدتر از رویکردهای سنتی مبتنی بر کدنویسی محسوب میشود.
حتما بخوانید: شش ربات انساننمای چینی ستاره کنسرت شدند + ویدیو
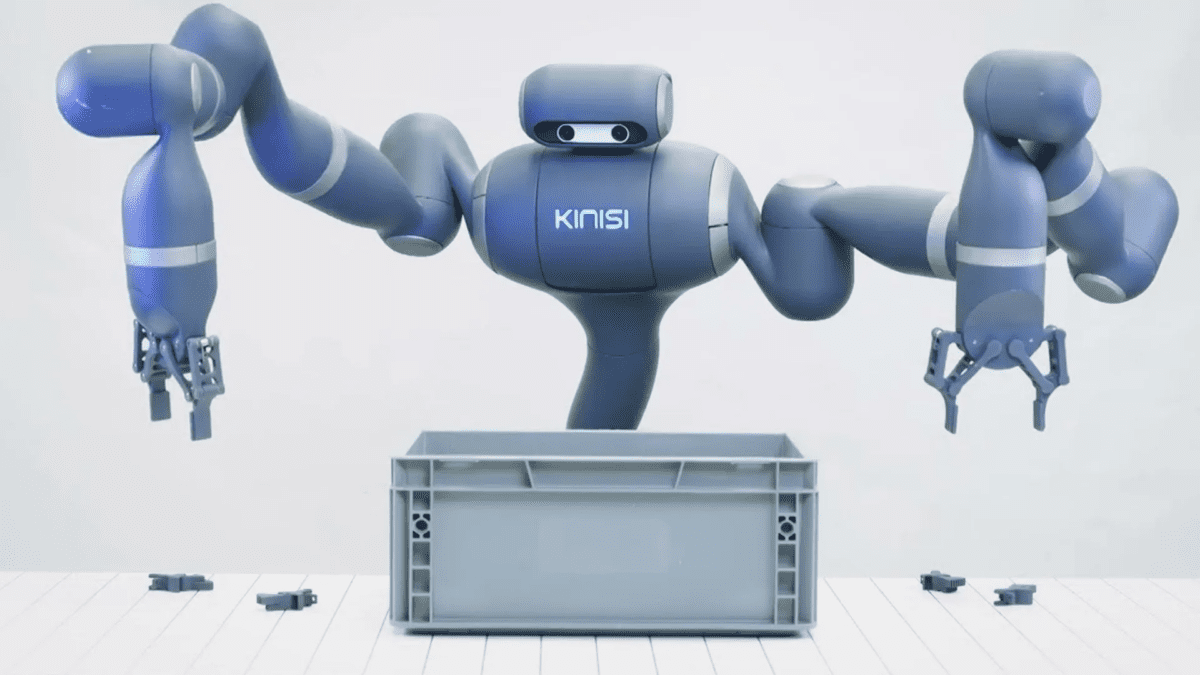
ربات KR-1 یک ربات انساننمای خودمختار ویژه محیطهای انبارداری است، که برای عملیات برداشتن، جابهجایی و مدیریت مواد طراحی شده است. این ربات با داشتن دو بازوی قدرتمند، پایه چرخدار، هوش مصنوعی داخلی و سیستم یادگیری مبتنی بر نمایش، به طور خاص برای کاربردهای لجستیکی و خردهفروشی توسعه یافته است؛ حوزههایی که نیازمند ترکیب همزمان قدرت فیزیکی و دقت بالا هستند. مهندسان برای آموزش این سامانه از رویکردی موسوم به «آموزش جنبشی» بهره گرفتند؛ روشی که در آن ربات با مشاهده و تقلید مستقیم از کنشهای انسانی، مهارتهای لازم را برای انجام یک وظیفه فرا میگیرد.
بیشتر بخوانید: ربات انساننمای T800 مدیرعامل شرکت را کتک زد! + ویدیو
01
از 02نحوه آموزش ربات انساننمای KR-1
در این چارچوب، اپراتور انسانی ربات را در حالت کنترل انعطافپذیر هدایت میکند و مراحل انجام کار را به صورت عملی نمایش میدهد؛ در همین حین، سیستم بهطور همزمان دادههای دیداری و الگوهای حرکتی ربات را ثبت و ذخیره میکند. در طول هر نمایش، تصاویر ثبتشده توسط دوربین RGB همراه با دادههای مربوط به حرکت بازوها و عملکرد گیرهها ثبت میشود و به این صورت، نگاشتی دقیق میان ورودیهای بصری و رفتار فیزیکی ربات شکل میگیرد. تکرار این فرایند به مهندسان کینسی رباتیکس امکان داد تا اطمینان حاصل کنند که ربات KR-1 به یک سناریوی از پیشتعیینشده محدود نمیشود و قادر است خود را با پیکربندیهای متفاوت برای شناسایی و تا کردن حوله سازگار کند.
برای مطالعه بیشتر: رونمایی چین از ربات انساننما برای کنترل ترافیک شهری + ویدیو
پس از تکمیل فرایند نمایش و جمعآوری دادهها، ربات برای عملکرد کاملا خودمختار آموزش داده میشود؛ آموزشی که بر یادگیری یک نگاشت مستقیم میان ورودیهای بصری و کنشهای فیزیکی استوار است. این سامانه با اتکا به تصاویر دوربین به عنوان منبع اصلی اطلاعات، تصمیم میگیرد حرکت بعدی چه باشد و بازوها و گیرهها چگونه باید بهطور پویا تنظیم شوند. برخلاف رویکردهای مبتنی بر برچسبگذاری صریح (مانند مشخص کردن گوشهها یا لبههای حوله) مدل بهتدریج الگوهای بصری (از محل احتمالی ظهور لبهها گرفته تا تاثیر کششهای مختلف بر تغییر شکل پارچه و شیوه نزدیک کردن دو بخش حوله برای تکمیل فرآیند تا کردن) را فرا میگیرد.
02
از 02چالش اشیای نرم برای رباتها
دستکاری اشیای نرم مانند حوله برای رباتها چالشی اساسی محسوب میشود، چراکه این مواد با کوچکترین کنش، بهطور پیوسته تغییر شکل میدهند. برخلاف اجسام صلب که میتوان رفتار آنها را با تکیه بر مدلهای هندسی و معادلات فیزیکی پیشبینی کرد، مواد تغییرپذیر بهسادگی قابل مدلسازی نیستند. در این چارچوب، بهجای اتکا به شبیهسازیهای صریح، ربات از طریق تجربه مداوم و تکرار عمل میآموزد و واکنشهای ماده را در برابر کنشهای مختلف درونیسازی میکند؛ فرایندی که شباهت زیادی به یادگیری مهارت در انسان از راه تمرین دارد.
این آزمایش، فراتر از یک وظیفه محدود مانند تا کردن حوله، نشانهای از یک تغییر رویکرد گسترده در رباتیک بهسوی دستکاری مبتنی بر یادگیری است. آموزش رباتها از طریق نمایش عملی، بهجای قوانین سخت و غیرقابل انعطاف، به مهندسان امکان میدهد مهارتها را به طیفی از وظایف پیچیده، نامطمئن و انعطافپذیر تعمیم دهند. چنین رویکردی میتواند زمینهساز حضور موثرتر رباتها در انجام کارهای روزمره خانگی و نیز عملیات صنعتی ظریف شود.




















