پژوهشگران دانشگاههای Stanford و Simon Fraser موفق به توسعه یک سیستم هوش مصنوعی جدید به نام TWIST شدهاند که به رباتهای انساننما امکان میدهد حرکات انسانها را به صورت بلادرنگ (real-time) تقلید کنند.
به گزارش تکناک، سامانه TWIST که به معنی «سیستم تقلید تمامبدن از راه دور» است، برای کاربردهای واقعی طراحی شده است و با ترکیب دادههای موشن کپچر (Motion Capture) با یادگیری تقویتی و تقلیدی، رباتها را برای انجام وظایف پیچیده هدایت میکند.
یانجیه زه، نویسنده اول مقاله درباره این سیستم گفت:
«ما حرکت انسان را با دقت ثبت و سپس با استفاده از هوش مصنوعی آن را به فرمانهایی تبدیل میکنیم که رباتها قادر به اجرای آنها هستند. دقت این سیستم در کنترل تمامبدن، از تمام کارهای پیشین بیشتر است و توانایی انجام حرکاتی را دارد که قبلاً ممکن نبود.»
مهندسان در سالهای اخیر روی سیستمهایی تمرکز کردهاند که به کاربران اجازه میدهد با تقلید حرکات تمامبدن انسانها، رباتهای انساننما را کنترل کنند. در این پژوهش جدید، هدف تیم تحقیقاتی این بود که رباتها به همان سطح از مهارت بدنی کامل برسند که انسانها دارند.
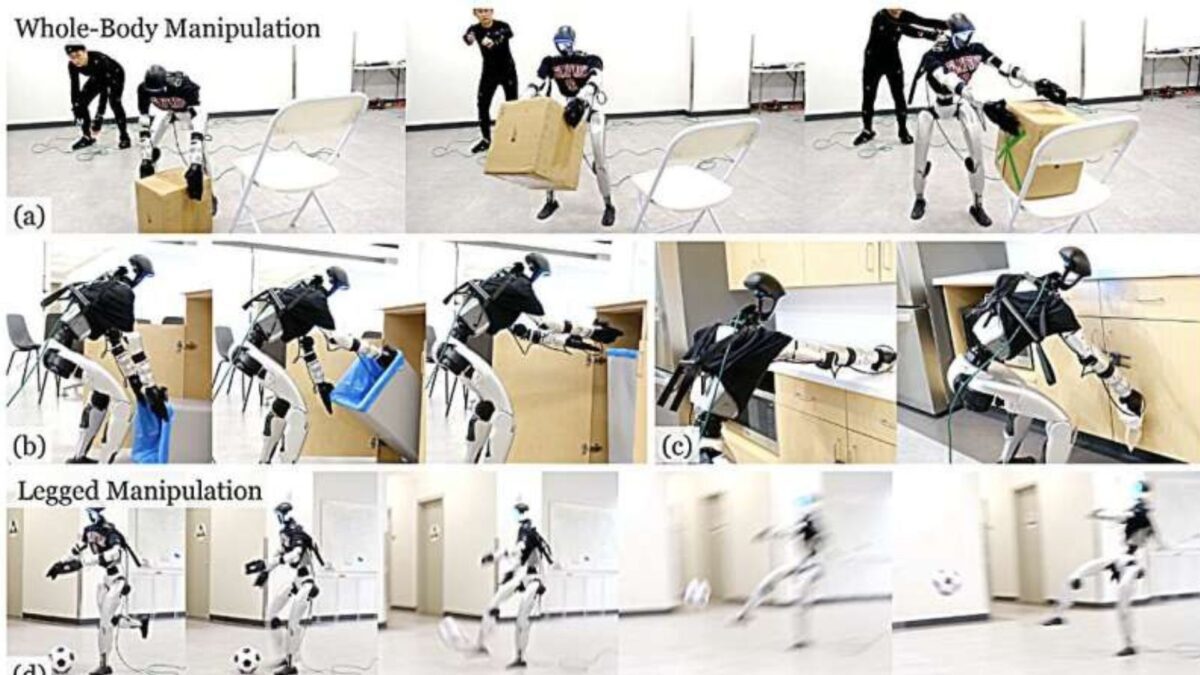
به عنوان نمونه، در یک محیط شلوغ مثل آشپزخانه، انسانها برای انجام کارهایی مانند: گرفتن اشیا با هر دو دست، جابهجایی موانع با پاها، یا باز کردن در با آرنج یا پهلو، از کل بدن خود استفاده میکنند.
این سیستم با استفاده از فناوری موشن کپچر، حرکات انسانها را با دقت بالا ثبت و آنها را با تقلید به حرکات متعادل و دقیق ربات ترجمه میکند. ترکیب دادههای با کیفیت و الگوریتمهای یادگیری، باعث میشود که ربات به صورت زنده و طبیعی حرکات انسان را تقلید کند.
سیستم TWIST در روند آموزش، از دادههای آفلاین و بلادرنگ استفاده میکند تا مشکلاتی مثل تاخیر یا حرکات پرشدار را کاهش دهد. همچنین دقت آن با بهینهسازی همزمان موقعیت و جهت مفاصل افزایش مییابد. در مرحلهای پیشرفتهتر، ربات را در برابر اختلالات آموزش میدهد تا برای وظایف فیزیکی مانند بلند کردن اشیا آمادگی داشته باشد.
این سیستم با ربات G1 از شرکت Unitree Robotics آزمایش شد و توانست کنترل بلادرنگ و دقیق تمام اعضای بدن ربات را ممکن کند. آزمایشها نشان دادند که تنها با دادههای حرکتی انسان، میتوان کنترل تمام اعضای ربات شامل پاها، کمر، زانوها و آرنج را انجام داد.
زه در ادامه تصریح کرد: «سیستم TWIST به رباتها اجازه میدهد که مانند انسانها از تمام اعضای بدن خود استفاده کنند. کاربرد فوری آن، استفاده از انسان برای هدایت ربات و جمعآوری دادههای گسترده جهت آموزش مدلهای پایه رباتیک است.»
با وجود پیشرفت چشمگیر، سیستم TWIST با چالشهایی از جمله نبود بازخورد بصری و لمسی برای اپراتور، دوام سختافزار محدود در رباتهای فعلی و نیاز به سیستمهای ثابت و گرانقیمت موشن کپچر روبهرو است.
پژوهشگران در تلاش هستند در آینده با استفاده از تخمین موقعیت از روی تصویر RGB به جای موشن کپچر، این فناوری را قابلحمل و قابلاستفاده در محیطهای مختلف کنند.
به گفته تیم تحقیق، این فناوری در تقلید حرکات انسانها با توسعه بیشتر میتواند در محیطهای خطرناک یا مشاغل صنعتی استفاده شود، که نیازمند دقت بالا هستند.
زه در پایان تأکید کرد: «ما میخواهیم که رباتهای انساننما واقعاً هوشمند شوند و توانایی انجام وظایف دنیای واقعی را پیدا کنند. گام بعدی ما، گسترش جمعآوری داده و آموزش مهارتهای خودکار به رباتها خواهد بود.»