فهرست مطالب
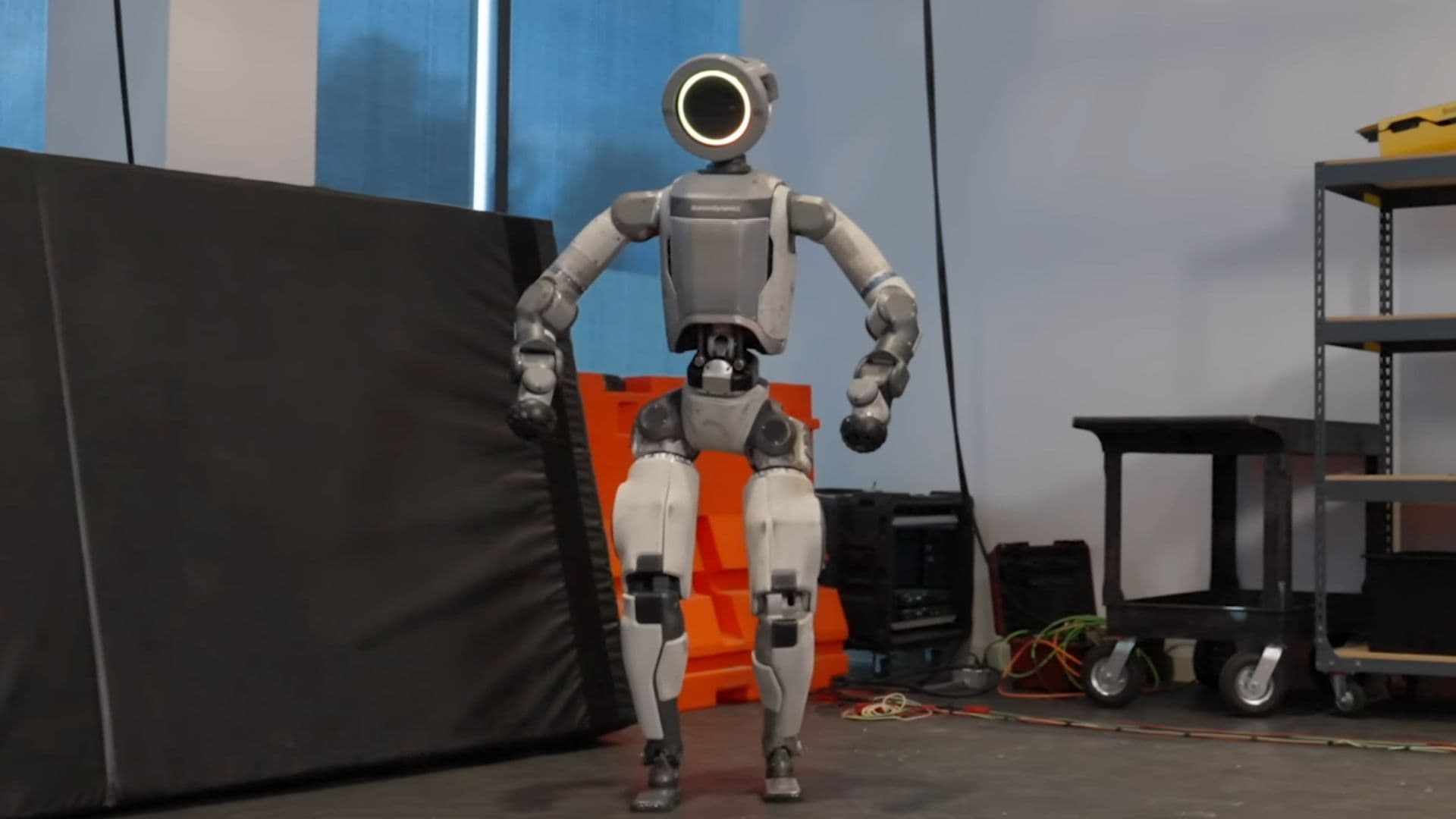
شرکت Boston Dynamics در آستانه پایان دوره آزمایشات نسخه تحقیقاتی ربات انساننمای Atlas قرار دارد و قبل از عرضه نسخه آماده تولید، یک تست آکروباتیک نهایی برای سنجش توان کنترل و تعادل آن انجام داده است.
به گزارش سرویس رباتیک تکناک، این آزمایشها در همکاری با موسسه رباتیک و هوش مصنوعی (RAI) انجام شد و Atlas را از طریق مجموعهای از حرکات پیچیده (از راه رفتن روان و طبیعی تا چرخوفلک و پشتک) آزمایش کرد تا مرزهای نرمافزار کنترل آن مشخص شود. نتایج نشان میدهد که یادگیری تمامبدنی آموزشدیده در شبیهسازی، به طور مستقیم قابل انتقال به رباتهای واقعی است و تصویری از توانمندیهایی ارائه میدهد که به زودی از آزمایشگاهها به خطوط تولید و محیطهای واقعی وارد خواهند شد.
حتما بخوانید: همکاری بزرگ هیوندای و شرکت رباتیک Boston Dynamics
01
از 02رباتیک و آکروباتیک!
در ویدیوی منتشرشده، ربات انساننمای Atlas ابتدا با گامهایی شبیه انسان به آرامی عبور میکند، سپس به اجرای چرخوفلک میپردازد که حرکت جانبی آن با هماهنگی دقیق دستها و پاها حفظ میشود و این جریان به یک پشتک منتهی میشود؛ Atlas بدن خود را در هوا جمع و با فرود صاف روی هر دو پا، تعادل خود را حفظ میکند. نسخه طولانیتر ویدیو شامل بازپخش حرکت آهسته و بخشهای «خطا» است که لحظاتی از لغزش یا افتادن ربات را نشان میدهد؛ مانند زمانی که ربات قدم اشتباهی برمیدارد اما با اصلاح جزئی جای پا، مسیر خود را ادامه میدهد. این جزئیات، پیچیدگی و دقت سیستم کنترل Atlas و محدودیتهای سختافزاری آن را به تصویر میکشد.
بیشتر بخوانید: هیوندای آزمایش رباتهای انساننما را در کارخانههای آمریکا آغاز کرد
موسسه RAI، که پیشتر با عنوان موسسه هوش مصنوعی شناخته میشد و توسط مارک رایبرت، بنیانگذار Boston Dynamics اداره میشود، نقش محوری در توسعه «هوش مصنوعی فیزیکی» پشت حرکات اخیر ربات انساننمای Atlas ایفا کرده است. در پستهای منتشرشده در X و یوتیوب، این موسسه توضیح داده است که حرکات ژیمناستیک و راه رفتن طبیعی ربات که در CES 2026 نشان داده شد، همگی از یک چارچوب یادگیری یکپارچه ناشی میشوند و از سیستمهای جداگانه استفاده نشده است.
02
از 02ربات انساننمای Atlas همهچیز را یاد میگیرد
به گفته RAI، این رفتارها مبتنی بر رویکرد یادگیری تمامبدنی و تکنیک zero-shot هستند، که امکان اجرای سیاستهای کنترلی آموزشدیده در شبیهسازی را روی سختافزار واقعی بدون نیاز به تنظیمات اضافی فراهم میکند. این گام، حرکت به سوی ایجاد رفتار انساننمای مقاوم و همهکاره است، که بتواند طیف وسیعی از حرکات و وظایف را با یک سیستم مدیریت کند. همکاری رسمی میان RAI و Boston Dynamics در اوایل ۲۰۲۵ شکل گرفت و هدف آن ارتقای رباتهای انساننما از طریق یادگیری تقویتی بود. اهداف شامل انتقال رفتارهای چابک از شبیهسازی به دنیای واقعی، بهبود مهارتهای حرکتی همراه با تعامل با اشیا و توسعه استراتژیهای تماس تمامبدنی برای هماهنگی همزمان دستها و پاها در وظایف دینامیک است.
برای مطالعه بیشتر: ربات انسان نمای اطلس به بینایی فرا انسانی مجهز شد!
این همکاری بر پایه تحقیقات پیشین یادگیری تقویتی، از جمله کیت Spot Reinforcement Learning استوار است، که باعث ثبت رکورد سرعت برای ربات چهارپا شد. در حالی که نسخه تحقیقاتی Atlas برای اجرای آکروباتیک و نمایشها طراحی شده است، نسخه تولیدی آن برای کاربردهای صنعتی آماده میشود. نسخه صنعتی Atlas با ۵۶ درجه آزادی برای تولید در تعداد بالا طراحی شده و گروه خودروسازی هیوندای تایید کرده است که این ربات تا سال ۲۰۲۸ در Metaplant آمریکا مستقر خواهد شد.