هرچند که ربات های چهار پا در عبور از سطوح ناهموار بهتر از ربات های چرخ دار عمل میکنند، اما بازهم در مسیر های باریک تعادل خود را از دست می دهند. با این حال، دانشمندان با ابداع یک روش جدید توانستند که این نقص را برطرف کنند.
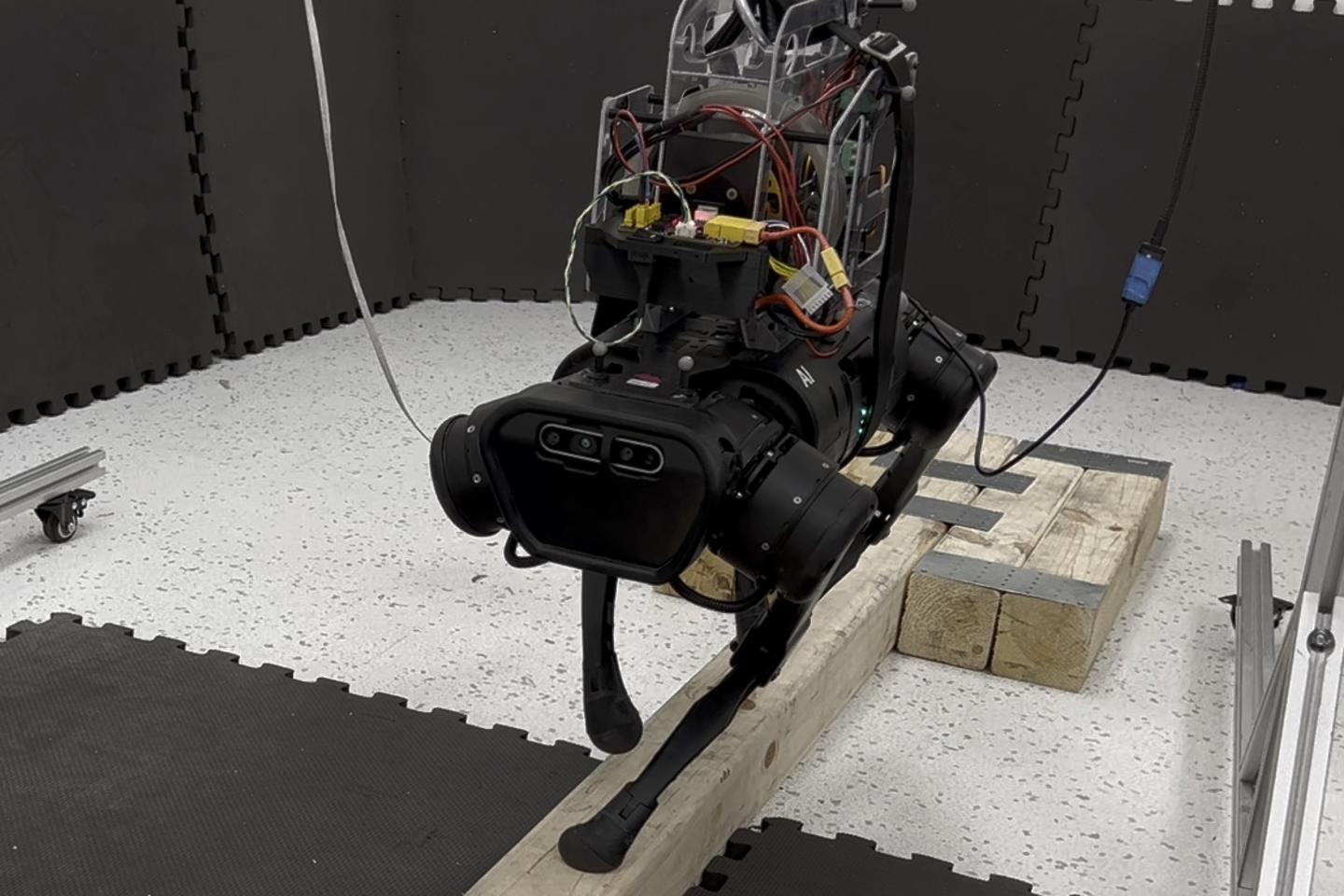
به گزارش تکناک، تیمی از مهندسان مؤسسه رباتیک دانشگاه کارنگی ملون، به رهبری پروفسور زکری منچستر کار خود را با ربات تجاری Unitree A1 آغاز کردند. آنها اقدام به نصب دو دستگاه معروف به محرک چرخ واکنشی در پشت ربات کردند. این ابزارها که به اختصار RWA نامیده می شوند، معمولاً برای تنظیم حرکت زاویه ای ماهواره ها استفاده می شوند.
منچستر گفت: شما اساساً یک چرخ لنگر بزرگ با یک موتور متصل دارید. اگر این چرخ لنگر سنگین را به یک طرف بچرخانید، ماهواره به سمت دیگر می رود. حالا آن را بردارید و روی بدنه یک روبات چهار پا قرار دهید.

یکی از RWA ها محور ربات را کنترل می کند، در حالی که دیگری محور چرخش آن را کنترل می کند و هر دو در یک ماژول 4.3 کیلوگرمی قرار دارند. فرقی نمی کند که کدام یک از پاهای ربات در هر لحظه با مسیر تعادل تماس داشته باشد، زیرا RWA ها به سادگی و به طور خودکار هرگونه تغییر در مرکز تعادل آن را جبران می کنند.
در مطالعات آزمایشگاهی، این ربات نه تنها توانست تا طول 3 متر، بر روی یک تیر چوبی با عرض 6 سانتیمتر راه برود، بلکه در برابر تلاشها برای لگد زدن به آن مقاومت کرد. هنگامی این ربات که از ارتفاع حدود نیم متری و به صورت وارونه به پایین افتاد، توانست خود را در هوا بچرخاند و مانند گربه روی پاهایش فرود آید.
منچستر معتقد است که قابلیت های اضافه شده، به خارج شدن ربات های چهار پا از آزمایشگاه و استفاده از آن ها در دنیای واقعی کمک می کند.
او گفت: ربات چهار پا در آینده مورد توجه بیشتری قرار خواهند گرفت. من فکر میکنم در چند سال آینده تعداد بیشتری از آنها را در بین انسان ها خواهید دید.
این تیم مقاله ای در مورد تحقیقات خود در ژوئن امسال، در کنفرانس بین المللی رباتیک و اتوماسیون در لندن در سال 2023 ارائه خواهد کرد.
می توانید تعادل حین حرکت Unitree A1 اصلاح شده را در ویدئوی زیر مشاهده کنید.