برخی از چالش های رباتیک بلافاصله کاربردهای واضحی دارند. بعضی از آنها بیشتر بر کمک به سیستم ها برای حل چالش های گسترده تر متمرکز هستند.
به گزارش تک ناک، آموزش ربات های کوچک برای بازی فوتبال در برابر یکدیگر کاملاً در دسته دوم قرار می گیرد.
نویسندگان مقاله جدید درباره جزئیات استفاده از یادگیری تقویتی برای آموزش ربات Mini Cheetah MIT در نقش دروازهبان شرح میدهند.
ا استفاده از ربات دروازه بان چهارپا یک مشکل چالش برانگیز است که حرکت بسیار پویا را با دستکاری دقیق و سریع اشیا غیرقابل نفوذ (توپ) ترکیب می کند.
ربات دروازه بان باید با استفاده از مانورهای حرکتی پویا در مدت زمان بسیار کوتاهی، معمولاً کمتر از یک ثانیه، به یک توپ متحرک واکنش نشان دهد و آن را رهگیری کند. در این مقاله، ما پیشنهاد میکنیم که با استفاده از یک چارچوب RL بدون مدل سلسله مراتبی به این مشکل رسیدگی کنیم.
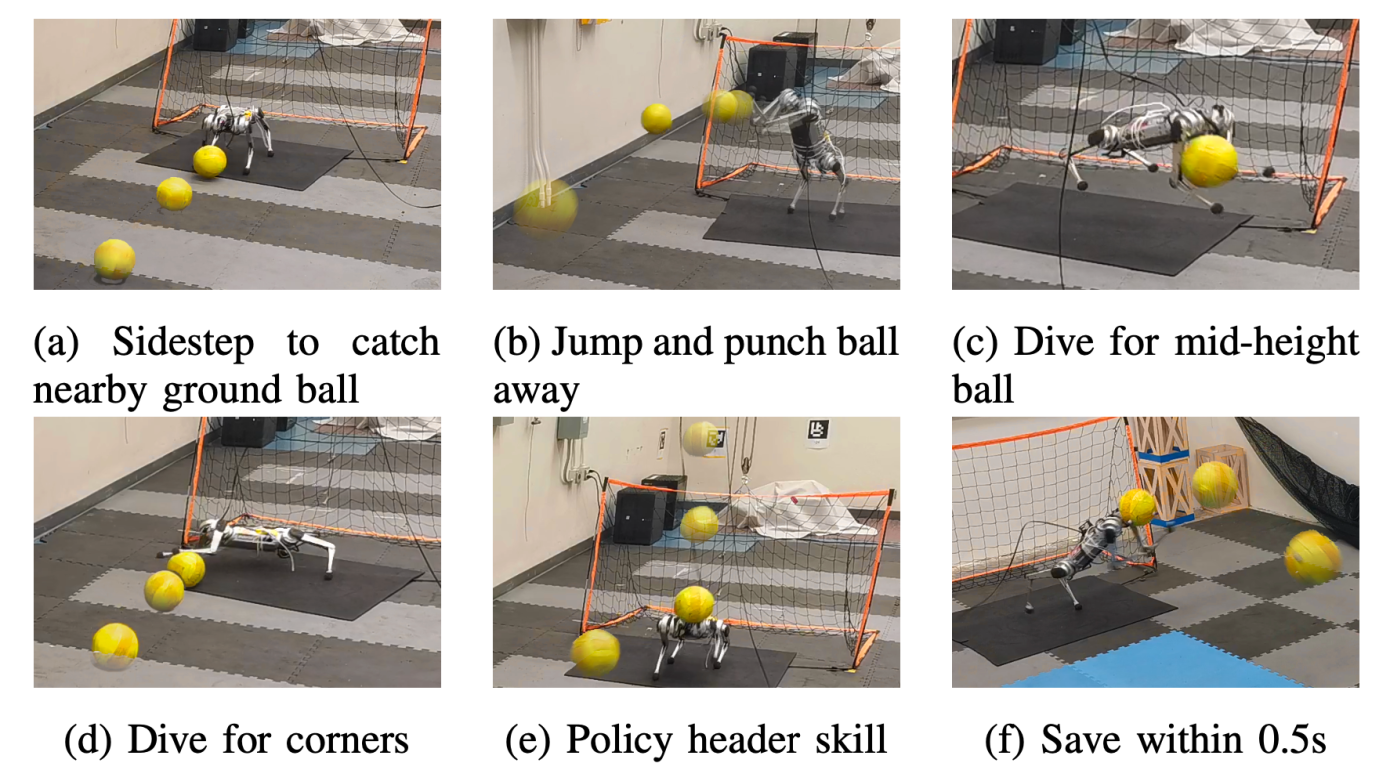
در واقع، ربات باید روی توپ قفل کند و در کمتر از یک ثانیه توپ را بلاک کند. پارامترهای ربات در یک شبیه ساز تعریف شده است و مینی یوزپلنگ که بر سه نوع حرکت متکی است ( کنار زدن، شیرجه زدن و پرش ) تا با تعیین مسیر حرکت توپ را در مسیر رسیدن به دروازه مهار کند.
برای آزمایش اثربخشی این برنامه، این تیم سیستم را در مقابل یک جزء انسانی و هم یک مینی یوزپلنگ قرار داد. قابل ذکر است، همان چارچوب اساسی که برای دفاع از دروازه استفاده می شود، می تواند در حمله نیز اعمال شود.
نویسندگان مقاله خاطرنشان می کنند در این کار، ما فقط بر روی وظیفه دروازه بانی تمرکز کردیم، اما چارچوب پیشنهادی را می توان به سناریوهای دیگری مانند ضربات چند مهارتی توپ فوتبال تعمیم داد.