پهپاد های بالزن ممکن است به طور بالقوه چابکتر و کارآمدتر از همتایان بال ثابت خود باشند، اما بیشتر آنها هنوز نمی توانند در یک نقطه ثابت پرسه بزنند.
به گزارش تکناک، یک مدل جدید از پهبادها با استفاده از مکانیزم پنجه پرندگان این محدودیت را برای نشستن موقت برطرف می کند.
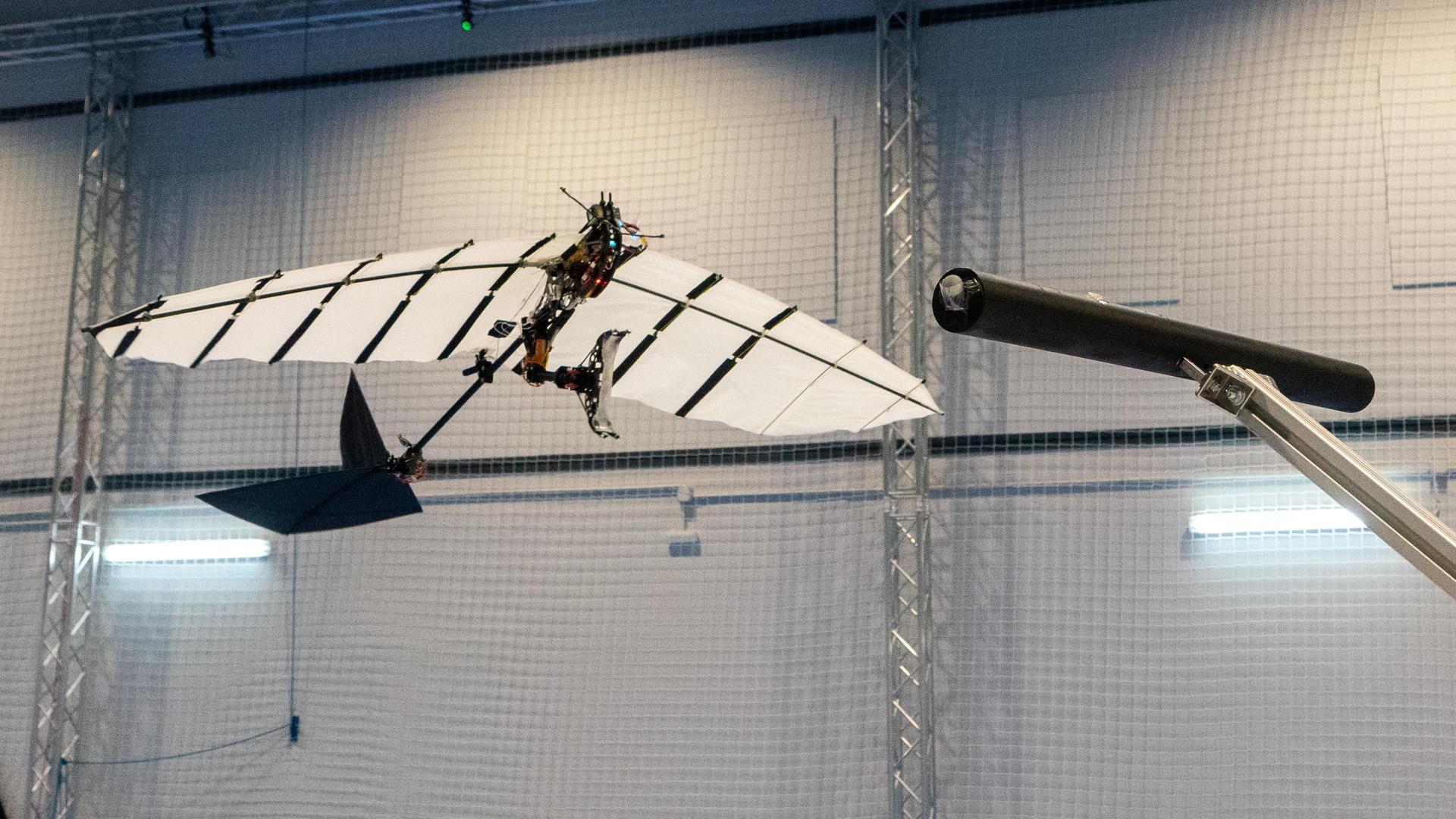
نمونه اولیه پهپاد بالزن خودران P-Flap (ربات بال بلندی که قابلیت نشستن دارد)، دارای طول بالهای 1.5 متری است و تنها 700 گرم وزن دارد. این پهباد توسط رافائل زوفری، محقق فوق دکتری در موسسه تحقیقاتی EPFL سوئیس طراحی شده است.
او این دستگاه را با همکاری همکارانش در دانشگاه سویل اسپانیا به عنوان بخشی از پروژه GRIFFIN اتحادیه اروپا ساخت و آزمایش کرد. GRIFFIN مخفف عبارت (سیستم رباتیک هوایی سازگار با بالهای ثابت و تکان دهنده برای افزایش برد و ایمنی) است.
به منظور گرفتن اهدافی مانند شاخه ها یا لوله ها، P-Flap به یک پنجه مکانیکی با بدنه فیبر کربنی مجهز شده است. این دستگاه دو پایدار است، به این معنی که برای ماندن در حالت باز و بسته خود به هیچ برقی نیاز ندارد. از طریق یک سروو پایه متحرک به قسمت زیرین پهپاد متصل می شود که می تواند در صورت نیاز آن را حرکت دهد.
همانطور که P-Flap در تنظیمات آزمایشی داخل ساختمان خود به یک میله افقی نزدیک می شود، توسط داده هایی که به صورت بی سیم از یک سیستم ضبط حرکت خارجی منتقل می شود هدایت می شود. این دادهها به پهپاد اجازه میدهد مکان خود را نسبت به میله تشخیص دهد، بنابراین سیستم کنترل پرواز آن میتواند فراز و نشیب خود را برای برخورد با هدف تنظیم کند.
هنگامی که پنجه پهباد به فاصله 1 متری از میله برسد، یک سنسور دید خطی در پایه پنجه داده های موقعیت دقیق تری را ارائه می دهد و سروو پا را برای قرار دادن دقیق پنجه فعال می کند.
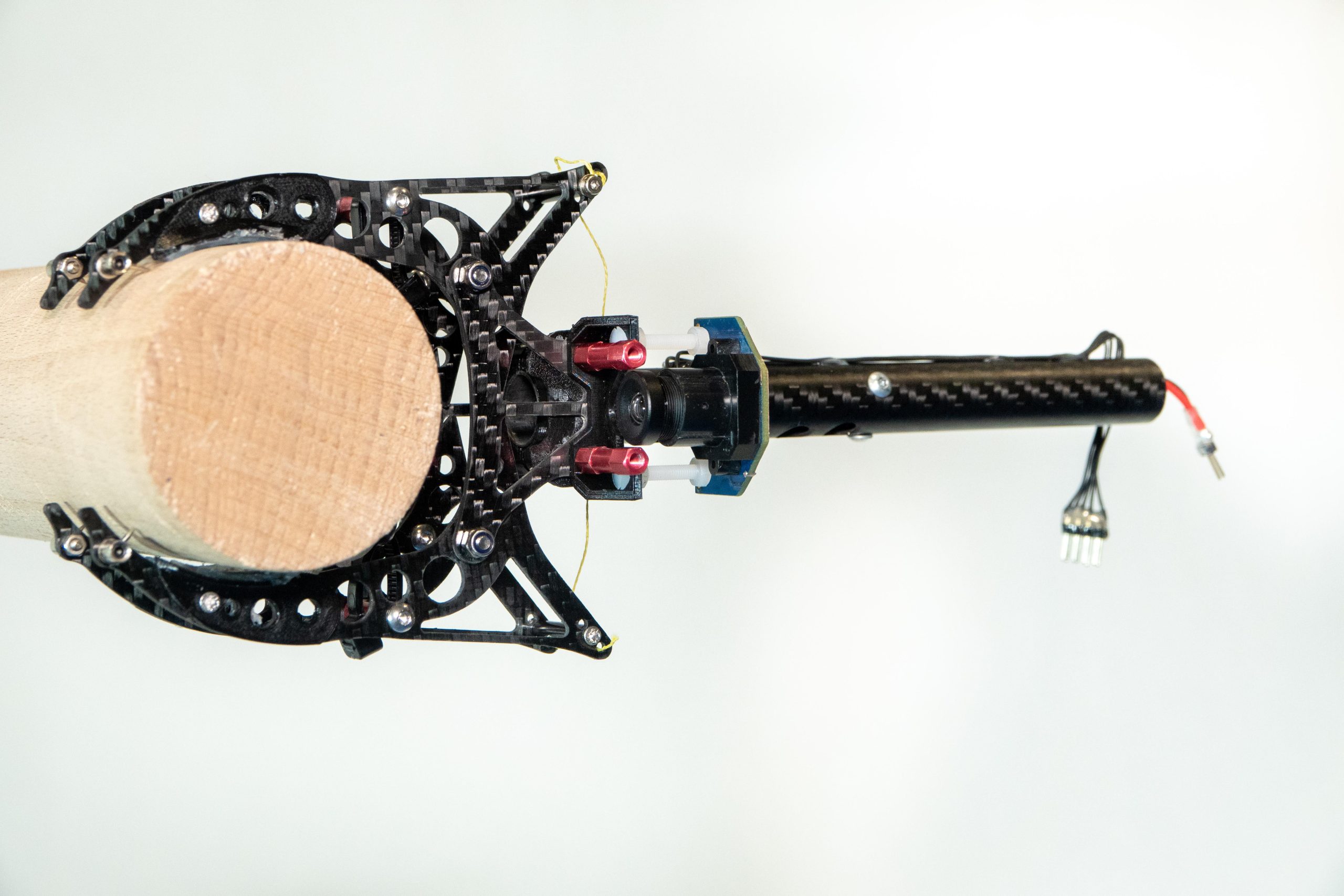
هنگامی که دو برآمدگی در قسمت باز داخلی پنجه متعاقباً به هدف برخورد می کند، فشار باعث می شود که پنجه به طور خودکار در عرض تنها 25 میلی ثانیه در اطراف میله بسته شود و P-Flap را محکم در جای خود نگه دارد.
هنگامی که زمان ترک محل استقرار و از سرگیری پرواز فرا می رسد، یک مکانیزم پیچ موتوری در شفت پنجه آن را دوباره باز می کند.
در یک سناریوی واقعی، پهپاد میتواند فعالیتهایی مانند مشاهده سوژههای زمینی، جمعآوری نمونههای بیولوژیکی از درختان، یا شارژ مجدد باتری خود از طریق پنلهای خورشیدی یکپارچه را انجام دهد. با این حال، هنوز باید کارهای بیشتری برای تکمیل این پروژه انجام شود.
زفری گفت: در حال حاضر، آزمایشهای پرواز در داخل ساختمان انجام میشود، زیرا ما باید یک منطقه پرواز کنترلشده با مکانیابی دقیق از سیستم ضبط حرکت داشته باشیم. در آینده، مایلیم استقلال ربات را برای انجام کارهای نشستن و پرواز در فضای باز در محیطی غیرقابل پیش بینی تر افزایش دهیم.