محققان کرهای با الهام از کشش سطحی یک قطره مایع آب، یک چرخ قابل تنظیم ابداع کردهاند، که شکل خود را در زمان واقعی تغییر میدهد و به راحتی با سطوح ناهموار و موانع بالا مقابله میکند.
به گزارش تکناک، یک فناوری جدید برای چرخها طراحی شده است، که قابلیت تنظیم تنش سطحی را دارد تا با موانع بهتر برخورد کند. این چرخها میتوانند سطح تماس خود را با زمین بر اساس شرایط مختلف تغییر دهند، به این شکل بهرهوری حرکت در مسیرهای متفاوت را بهبود میبخشند.
این کشف درهای جدیدی را برای توسعه ویلچر یا رباتهای متحرکی باز میکند، که میتوانند بهتر از زمینهای ناهموار عبور نمایند.
چرخها، اجزای ضروری ماشینها، کامیونها و دوچرخهها هستند. اما زمانی که صحبت از ویلچر به میان میآید، عملکرد ضعیف چرخ در عبور از سطوح ناهموار یا سطوح دارای موانع به این معنی است که افراد ویلچری بیشتر محدود به ماندن در جادههای هموار و صاف هستند. همین موضوع در مورد رباتهای متحرک نیز صادق است.
اختراع مجدد چرخ به احتمال زیاد برای خیلی از افراد غیر قابل باور باشد. چند سال قبل، شرکت لاستیکسازی هانکوک با دانشگاه ملی سئول و هاروارد همکاری کرد تا چرخهایی را با الهام از اوریگامی ایجاد کند. سالها قبل از آن، یک دانشجو به نام آکین نگونیا سیستم چرخ بدون جاده خود را توسعه داد که آج آن با چرخش پیچ از باریک به پهن تنظیم میشد. در همین زمان، ناسا لاستیکهایی را برای مریخنوردهای خود ساخت که از آلیاژ نیکل-تیتانیوم ساخته شده بودند، که میتوانستند به سمت پایین محور تغییر شکل دهند و سپس به شکل اولیه خود بازگردند.
مشکل ایجاد شده توسط زمین ناهموار یا مملو از موانع را میتوان با استفاده از یک سیستم حرکتی مبتنی بر مسیر، که یک مکانیسم طراحیشده ویژه است و مساحت سطح چرخ را افزایش میدهد، برطرف کرد. با وجود این، چنین سیستمی به سرعتهای کم محدود میشود و انرژی بیشتری نسبت به سیستم چرخدار مصرف میکند.
استفاده از لاستیکهای بدون هوا یا غیر پنوماتیک برای عبور از زمینهای ناهموار مزیتی را ایجاد میکند، به این دلیل که در برابر سوراخشدگی، نشتی و فوران مقاوم هستند. اما سفتی آنها به این معنی است که آنها در غلبه بر موانع، به ویژه موانع بالا، عالی نیستند، چرا که کمتر تغییر شکل میدهند یا کمتر قادر به انطباق با زمینی هستند که روی آن حرکت میکنند.
بنابراین، دانشمندان با الهام از کشش سطحی یک قطره مایع، چرخی با سفتی متغیر ساختند که میتواند بر زمینهای ناهموار و موانع غلبه کند و مزایای چرخهای معمولی را روی زمین صاف حفظ نماید.
کشش سطحی یک مایع ناشی از عدم تعادل در نیروهای جاذبه یا منسجم بین مولکولها است. در یک قطره، با افزایش نیروی چسبندگی مولکولهای سطح، نیروی خالصی که مولکولهای مایع را به داخل میکشد نیز افزایش مییابد و در نتیجه قطرات به شکل دایرهای بازمیگردند.
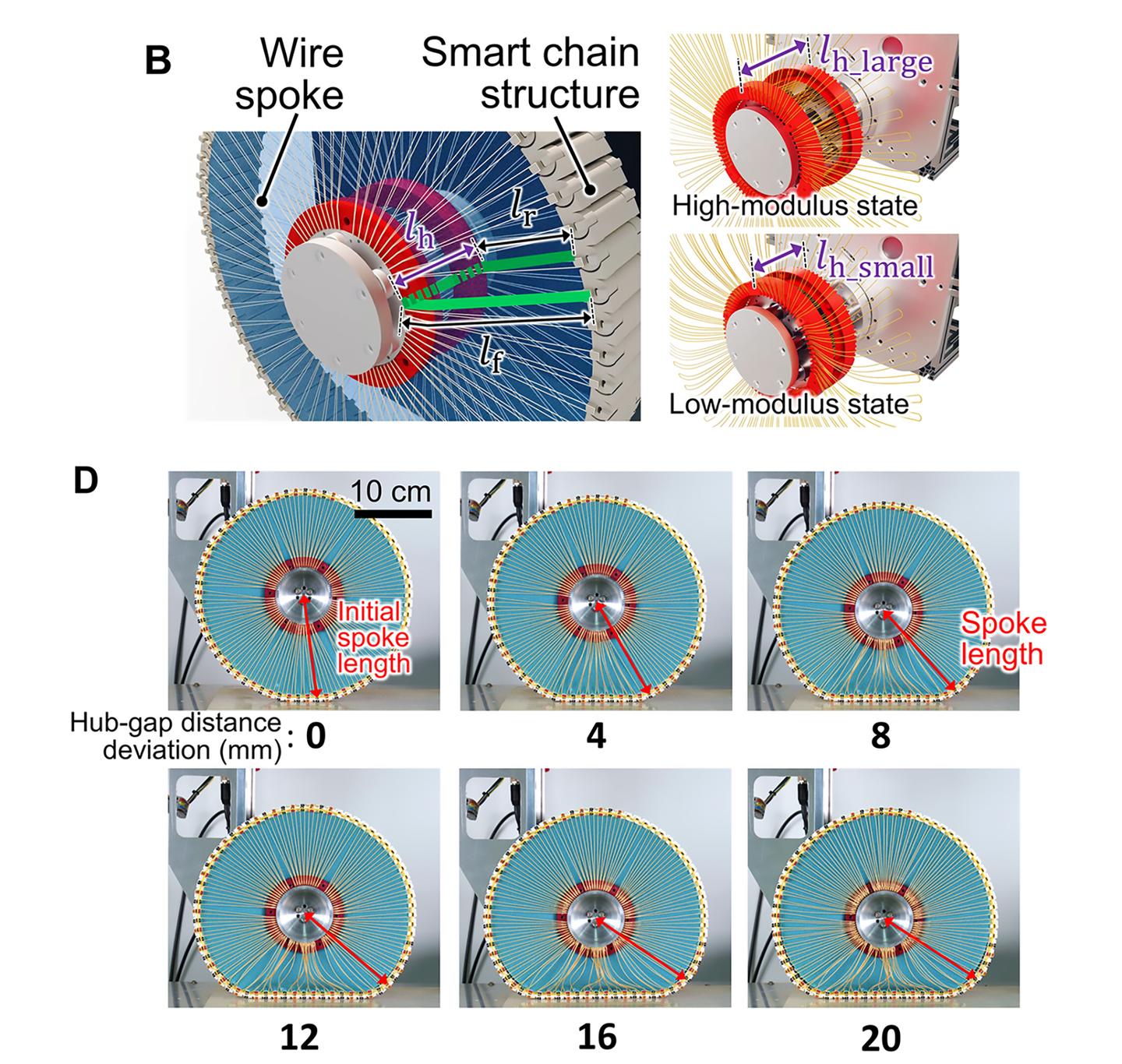
یکی از جنبههای کلیدی چرخ تغییر شکلپذیر، ساختار زنجیرهای هوشمند آن است که شامل زنجیرهای از بلوکها در اطراف بیرون چرخ میباشد، که توسط پرههای سیمی به طرف مقابل یک هاب مرکزی متصل شدهاند.
با تغییر شکاف بین دو طرف توپی، محققان میتوانند طول پرهها و در نتیجه شکل زنجیره بیرونی بلوکها را تغییر دهند. در نهایت محققان با افزایش فاصله هاب پرهها را کوتاه کردند، بلوک زنجیر را به سمت داخل فشار دادند و یک چرخ دایرهای برای حرکت سریع ساختند. کوتاه کردن آن باعث طولانی شدن پرههای سیم و شل شدن بلوک زنجیر شد و به آن اجازه داد تغییر شکل دهد و بتواند از موانعی که با آن برخورد میکرد، عبور نماید.
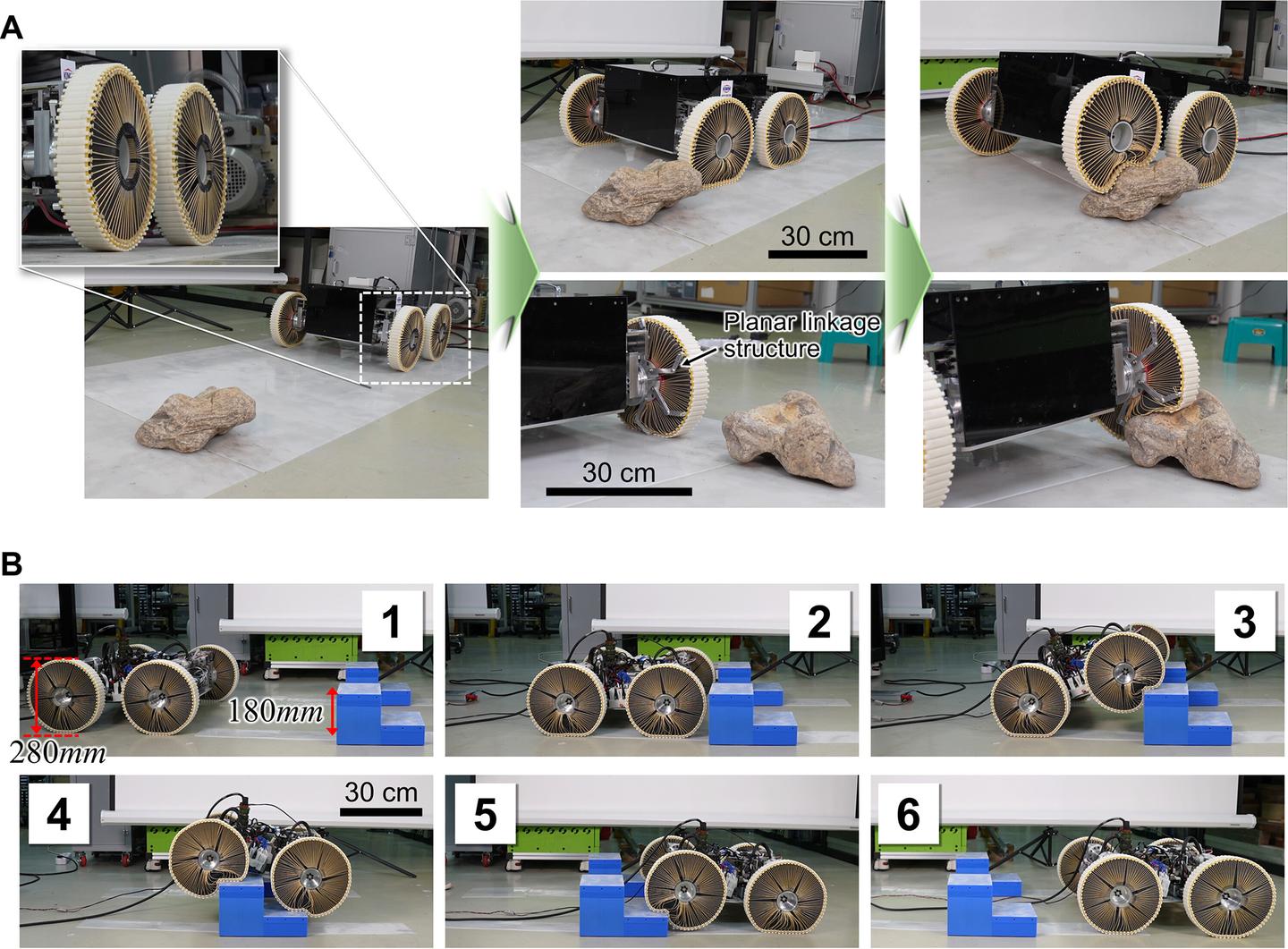
محققان چرخ قابل انطباق خود را در یک ویلچر دو چرخ و یک وسیله نقلیه چهار چرخ آزمایش کردند و به این نتیجه رسیدند که هر کدام از این وسایل نقلیه میتوانند با پلههای بزرگ و صخرههای نامنظم 1.2 برابر بیشتر از شعاع چرخ سازگار شوند و روی آنها حرکت کنند.
سیستم ویلچر دو چرخ، که 120 کیلوگرم وزن دارد، به راحتی روی زمینهای ناهموار و چمنزار حرکت میکند.
البته محققان اعلام کردند که گرد و غبار و ذرات، وارد نواحی بین بلوکهای زنجیرهای هوشمند میشوند و آسیب به چرخ را به دنبال دارند.
به همین دلیل آنها در حال کار روی اضافه کردن ساختار پوششی چرخ هستند. محققان پتانسیل زیادی در چرخ تطبیقپذیر خود میبینند.
این مطالعه در مجله Science Robotics منتشر شده است.
منبع: EurekAlert