یک چرخدستی پرنده با نام Palletrone از پهپاد چند موتوره برای حمل محمولهها در ارتفاع قفسه سینه استفاده میکند.
به گزارش تکناک، کاربران با اعمال نیرو روی دستگیره، جهت و حرکت آن را کنترل میکنند، در حالی که سیستم پهپاد سطح محموله را ثابت نگه میدارد.
اگرچه صدای پهپاد و ظرفیت حمل محدود از چالشهای آن است، اما قابلیتهایی مانند: عبور از پلهها و امکان استفاده به عنوان سهپایه پرنده برای دوربینها از ویژگیهای نوآورانه آن به شمار میروند.
چه در مرکز خرید باشید و چه در حال جابهجایی وسایل در دفتر کار، احتمال دارد با چرخدستی که یک چرخ خراب دارد، مواجه شده باشید. چرخدستی پرنده Palletrone این مشکل را حل میکند.
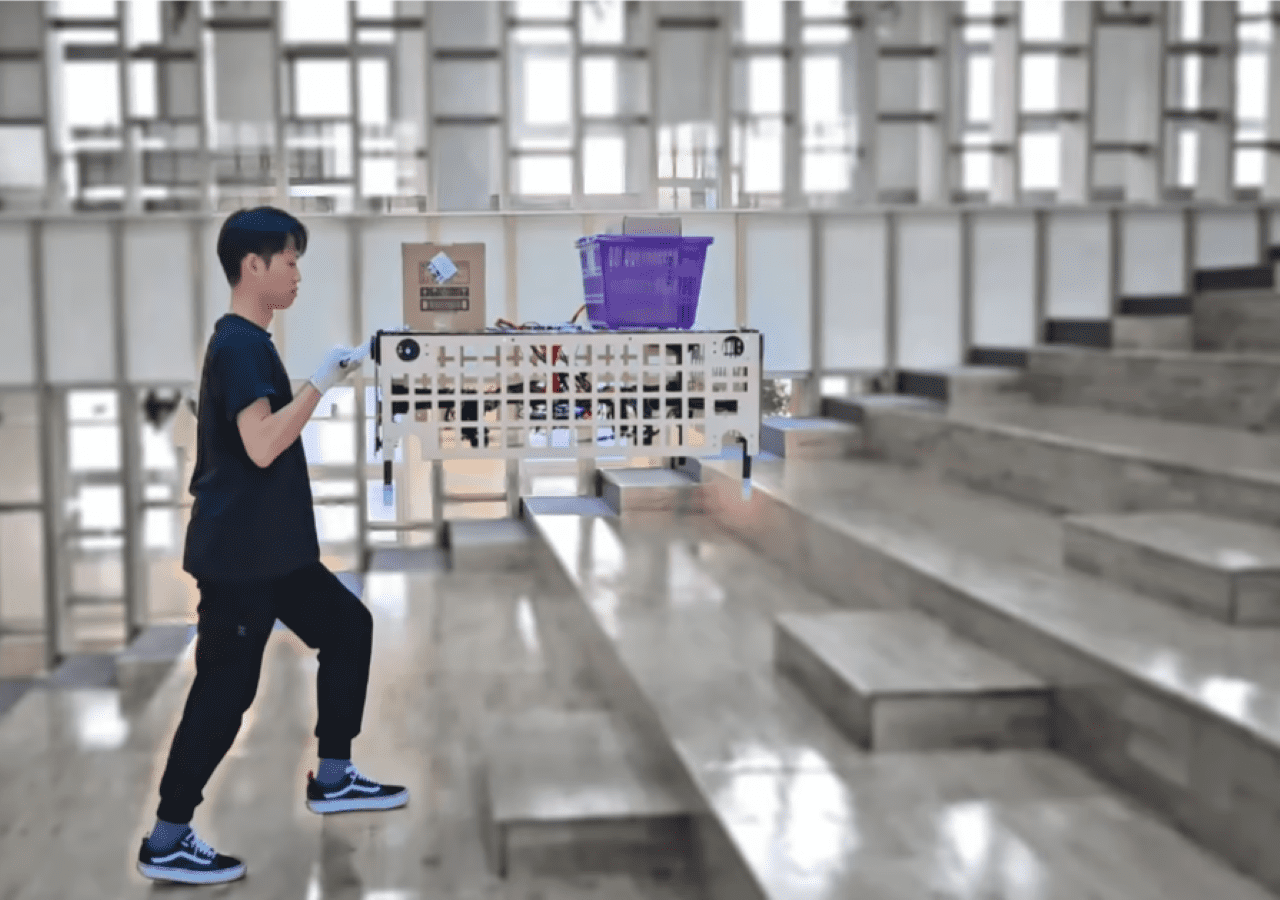
با توجه به ایده اصلی، کاربران به جای اینکه با یک چرخدستی چرخدار روی زمین حرکت کنند، یک پهپاد چند موتوره را درون یک قفس قرار میدهند تا یک پلتفرم بارگیری از بالا ایجاد شود، که به کاربران اجازه میدهد وسایل را در ارتفاع سینه جابهجا کنند.
این پلتفرم با سطح بالایی وسیع برای بارگیری آسان طراحی شده است و با یک دسته در پشت شبیه به چرخدستی خرید میباشد.
تیم تحقیقاتی دانشگاه ملی علوم و فناوری سئول (SeoulTech) در مقدمه مقالهای درباره این پروژه اعلام کردند: «کنترل مسیر پرواز توسط یک اپراتور انسانی که دسته را میگیرد و نیروها و گشتاورهای سهبعدی را اعمال میکند، انجام میشود، در حالی که حمل بار پایدار با حفظ وضعیت صفر رول و پیچ در طول پرواز حفظ خواهد شد.»

اپراتور چرخدستی را با اعمال نیرو و گشتاور کنترل میکند و مسیر پرواز را تحت تأثیر قرار میدهد. به عبارت دیگر، کاربر با استفاده از دستگیره، حرکت رو به جلو و جهت را کنترل میکند، در حالی که سختافزار و نرمافزار پلتفرم را در بالای زمین شناور نگه میدارند.
کاربر از روتورهای سریع پهپاد با یک جعبه متخلخل که جریان هوای کافی برای پرواز پهپاد را فراهم میکند، محافظت میشود و تنها با حداقل کاهش عملکرد مواجه است.
یکی از معایب این روش، صدای تولید شده توسط پهپاد است. دیگری ظرفیت بار کم تنظیمات فعلی با 2.93 کیلوگرم میباشد، چرا که این مقدار برای حمل خرید هفتگی یک خانواده در هوا یا کمک به کارگران انبار برای جابهجایی کارآمد وسایل کافی نیست. همچنین باید به زمان پرواز محدود باتریهای داخلی توجه کرد.
با کمی دستکاری بیشتر، بسیاری از مشکلات میتواند حل شود و یکی از مزایای بزرگ این روش، توانایی آسان برای عبور از پلهها با استفاده از پالترون است. در نسخه فعلی، محققان از یک الگوریتم کنترل پرواز پایه استفاده کردهاند.
همچنین سیستم از عملگرهایی برای تنظیم مداوم رول و پیچ استفاده میکند و نه تنها پلتفرم را در طول عملیات در سطح نگه میدارد، بلکه نیروهای اعمال شده توسط کاربر انسانی را نیز در نظر میگیرد.
طراحی این چرخدستی فرض میکند که تمام اختلالات اعمال شده به سیستم از طرف اپراتور است، بنابراین هر مانعی در مسیر امکان دارد مشکلاتی ایجاد کند.
در مورد کاربردهای آینده این فناوری فراتر از تنظیمات لجستیکی یا فروشگاههای مواد غذایی، یکی از محققان این نوآوری به نام سئونگ جائه لی گفت که با اتصال یک دوربین به پلتفرم، این چرخدستی میتواند به عنوان یک سهپایه پرنده و حرکات و زوایای دوربین انعطافپذیر را فراهم کند. این موضوع به ویژه در محیطهایی که تجهیزات فیلمبرداری تخصصی به سختی قابل تهیه است، مفید خواهد بود.
مراحل بعدی ممکن است شامل توسعه یک سیستم داکینگ باشد، که امکان شارژ در زمان پرواز را فراهم کند تا عملیات طولانیتری داشته باشد.
جزئیات این پروژه در مقاله منتشرشده در مجله IEEE Robotics and Automation Letters قابل مشاهده است.




















