فهرست مطالب
پژوهشگران دانشگاههای امپریال کالج لندن و بریستول در دستاوردی چشمگیر اعلام کردند که ربات پرنده میتواند روزی آسمانخراشهایی مانند: برج خلیفه دبی یا ساختمان امپایر استیت نیویورک را بسازد.
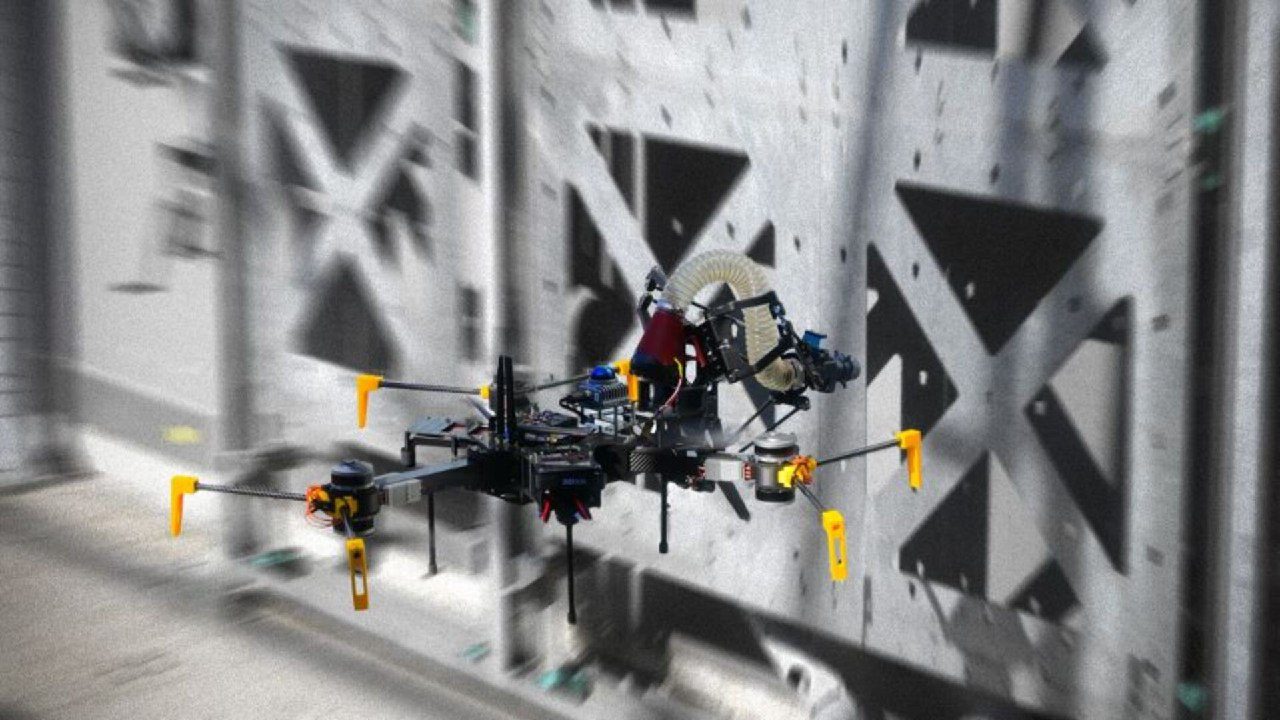
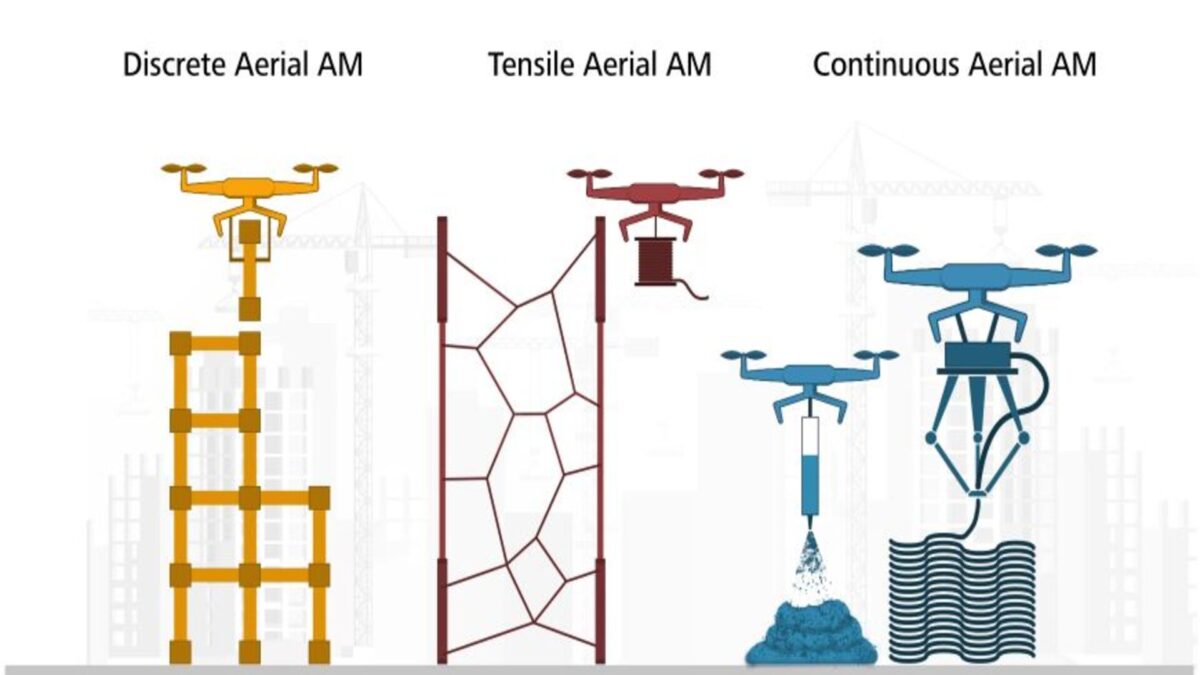
به گزارش تکناک، در این پژوهش، چگونگی استفاده از پهپادها برای انجام فرایند رسوبدهی مواد در هوا به طور خودکار بررسی شده است، که به عنوان Aerial Additive Manufacturing یا به اختصار Aerial AM شناخته میشود و گامی مهم در توسعه فناوری ساختوساز هوایی برداشته شده است.
این روش که با استفاده از رباتهای پرنده، امکان انجام وظایف ساختوساز بدون محدودیت را فراهم میکند، مزایای متعددی از جمله ساخت در ارتفاعات بالا، دسترسی به مکانهای سختدسترس و تعمیرات سریع و بهموقع را ارائه میدهد.
محققان هدف از توسعه این فناوری را پاسخ به چالشهای جهانی در حوزه مسکن و زیرساختها عنوان کردهاند؛ آن هم با بهکارگیری رباتهای پرندهای که با بهرهمندی از بازوهای پیشرفته، میتوانند بر محدودیتهای روشهای سنتی ساختوساز و سامانههای زمینی غلبه کنند.
01
از 02دستاوردی جدید در ساختوساز با پهپاد
ربات پرنده برخلاف روشهای سنتی یا سامانههای زمینی، در محیطهای بدون محدودیت فعالیت میکند و این توانایی را دارد که سازههایی را در ارتفاعات بالا بسازد و در زمینهای ناهموار یا مناطق صعبالعبوری (کوهستانها، بامها، مناطق بحرانزده یا حتی در سیارات دیگر) عملیات ساختوساز انجام دهد، که روشهای معمول به آنها دسترسی ندارند.
این رباتها نیازی به محل ثابت برای ساختوساز ندارند، میتوانند به صورت گروهی عمل کنند و از انعطافپذیری و مقیاسپذیری بالایی برخوردار هستند. در عین حال، استفاده از آنها میتواند فاصلههای حملونقل را کاهش دهد، مصرف مواد را کم کند و ایمنی سایتهای ساختوساز را به میزان چشمگیری افزایش دهد.
پژوهشگران به منظور پشتیبانی از این فناوری نوظهور، یک چارچوب خودگردان ویژه برای Aerial AM طراحی کردهاند، که به چالشهایی مانند: هماهنگی پرواز، دقت در رسوبدهی مواد و مقیاسپذیری ساختوساز در ابعاد بزرگ میپردازد.
باساران بهادیر کوچر، دانشیار دانشگاه بریستول و نویسنده همکار این مطالعه گفت: «با وجود پیشرفتهای امیدوارکننده، استفاده از رباتهای پرنده برای ساختوساز خودکار در مقیاس بزرگ هنوز در مراحل اولیه قرار دارد.»
وی تصریح کرد: «موانع اصلی شامل دوام مواد، سیستمهای مکانیابی برای محیطهای بیرونی و هماهنگی بین چندین واحد پرنده است.»
هرچند بازوهای رباتیک و گانتریهای چاپ سهبعدی در سایتهای ساختوساز استفاده میشوند، اما این سامانهها اغلب سنگین، زمینی و دارای تحرک محدود هستند و در زمینهای ناهموار یا ارتفاعات بالا عملکرد مؤثری ندارند؛ جایی که انعطافپذیری بسیار اهمیت دارد.
کوچر تأکید کرد: «غلبه بر این چالشها برای بهرهگیری کامل از ظرفیتهای Aerial AM در کاربردهای واقعی ضروری است.»
او اعلام کرد: «نمایشهای اولیه Aerial AM تاکنون قابلیتهایی مانند: تعمیرات سریع و تکنیکهای مونتاژ ماژولار را به نمایش گذاشتهاند، که میتواند راه را برای پذیرش گستردهتر این فناوری در صنایع مختلف هموار کند.»
02
از 02آزمایشهای میدانی ربات پرنده در دنیای واقعی
این فناوری هماکنون در مرکز DroneHub در سوئیس، که زیر نظر مؤسسه EMPA (آزمایشگاههای فدرال علوم مواد و فناوری) اداره میشود، تحت آزمایشهای میدانی قرار گرفته است. این نخستین بستر آزمایشی واقعی برای ماشینهای ساختوساز پرنده در خارج از محیطهای آزمایشگاهی به حساب میآید.
ربات پرنده بهویژه برای امدادرسانی در بلایای طبیعی کاربرد دارد؛ به خصوص در مناطقی که وسایل نقلیه زمینی نمیتوانند به آنها دسترسی پیدا کنند.
این رباتها قادر هستند که مصالح ساختمانی را حمل کنند و به طور خودکار پناهگاههای اضطراری بسازند. همچنین میتوانند در عملیات تعمیر مکانهای سختدسترس مانند: ترکهای موجود بر نمای ساختمانهای بلند یا پلها بدون نیاز به نصب داربست مشارکت کنند.
یوسف فرکان کایا، پژوهشگر دکتری در EMPA و آزمایشگاه Sustainability Robotics در مؤسسه EPFL و نویسنده اصلی این مطالعه، توضیح داد که سامانههای رباتیک زمینی اغلب چندین تن وزن دارند، برای راهاندازی به زمان طولانی نیازمند هستند و در محدودههای جغرافیایی محدودی کار میکنند.
وی بیان کرد: «از سوی دیگر، پهپادهای ساختمانی، سبک، متحرک و انعطافپذیر هستند، اما در حال حاضر تنها در سطوح پایین آمادگی فناوری قرار دارند و هنوز به طور گسترده برای مصارف صنعتی به کار گرفته نشدهاند.»
کایا تأکید کرد: «بدون دسترسی به موادی که سبک، پایدار و مناسب برای ساخت باشند، این فناوری نمیتواند به تمام ظرفیت بالقوه خود دست یابد.»
او تصریح کرد که این موضوع مستلزم تطبیق طراحیهای ساختمانی برای جبران دقت محدود رباتهای پرنده است تا ایمنی و قابلیت اطمینان سازهها تضمین شود.
بر همین اساس، چارچوب خودگردانی که پژوهشگران معرفی کردهاند، شامل پنج مرحله از پروازهای مبتنی بر مسیر ساده تا استقلال کامل است؛ جایی که رباتهای پرنده میتوانند محیط اطراف خود را تحلیل کنند، خطاها را شناسایی نمایند و طراحیها را به صورت بلادرنگ تطبیق دهند.
کایا در پایان اعلام کرد: «هدف ما این است که رباتهای پرنده نه تنها درک دقیقی از موادی داشته باشند که با آنها کار میکنند و محیط اطراف خود را بشناسند، بلکه بتوانند به طور هوشمند ساختار نهایی را در زمان ساخت بهینهسازی کنند.»
این مطالعه در نشریه Science Robotics منتشر شده است.




















