فهرست مطالب
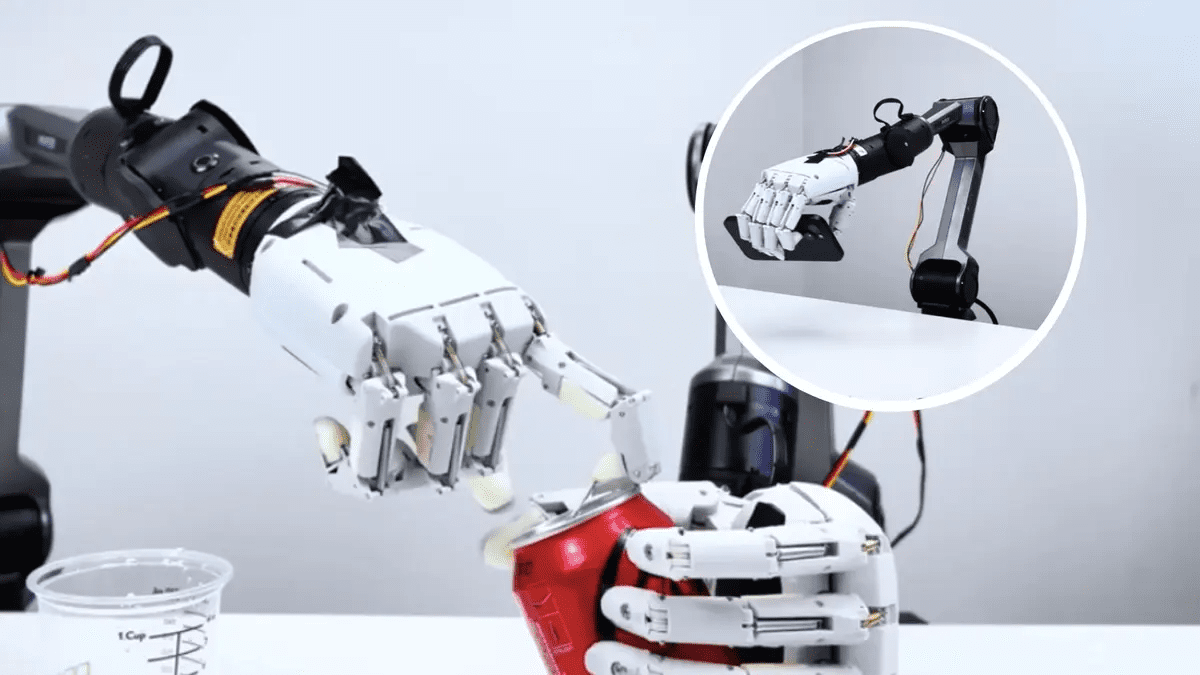
شرکت TetherIA مستقر در کالیفرنیا، از دست رباتیکی به نام Aero Hand Open رونمایی کرده که قادر است وظایف پیچیدهای مانند بازکردن قوطی نوشابه و در دست گرفتن آیفون را با مهارت انسانی انجام دهد.
به گزارش تکناک، این فناوری جدید با طراحی تاندونی و ساختار انعطافپذیر خود، پاسخی به یکی از دشوارترین چالشهای دنیای رباتیک، یعنی دستیابی به مهارت و چابکی انسانی در کنترل اشیا است.
ژو دونگ، مهندس ارشد این پروژه گفت: «ما بالاخره آنچه ماهها در سکوت روی آن کار میکردیم را به اشتراک میگذاریم، Aero Hand Open، دستی رباتیک با 16 تاندون که برای بدن رباتیک با هوش مصنوعی ساخته شده است.» این دست رباتیک در نمایش اولیه توانست با دقتی خیرهکننده پیچ M5 را بگیرد، آیفون را در دست بگیرد و قوطی نوشابهای را باز کند؛ حرکاتی که تا پیش از این تنها از انسان برمیآمد.
01
از 03برتری این دست رباتیک در برخورد با اشکال نامعمول
دونگ در طی معرفی پروژه بیان کرد: «این همان ترکیب دقت و توانایی است که مدتها بهدنبال آن بودیم و حالا واقعا میتوانید یکی از آنها را در اختیار داشته باشید.»
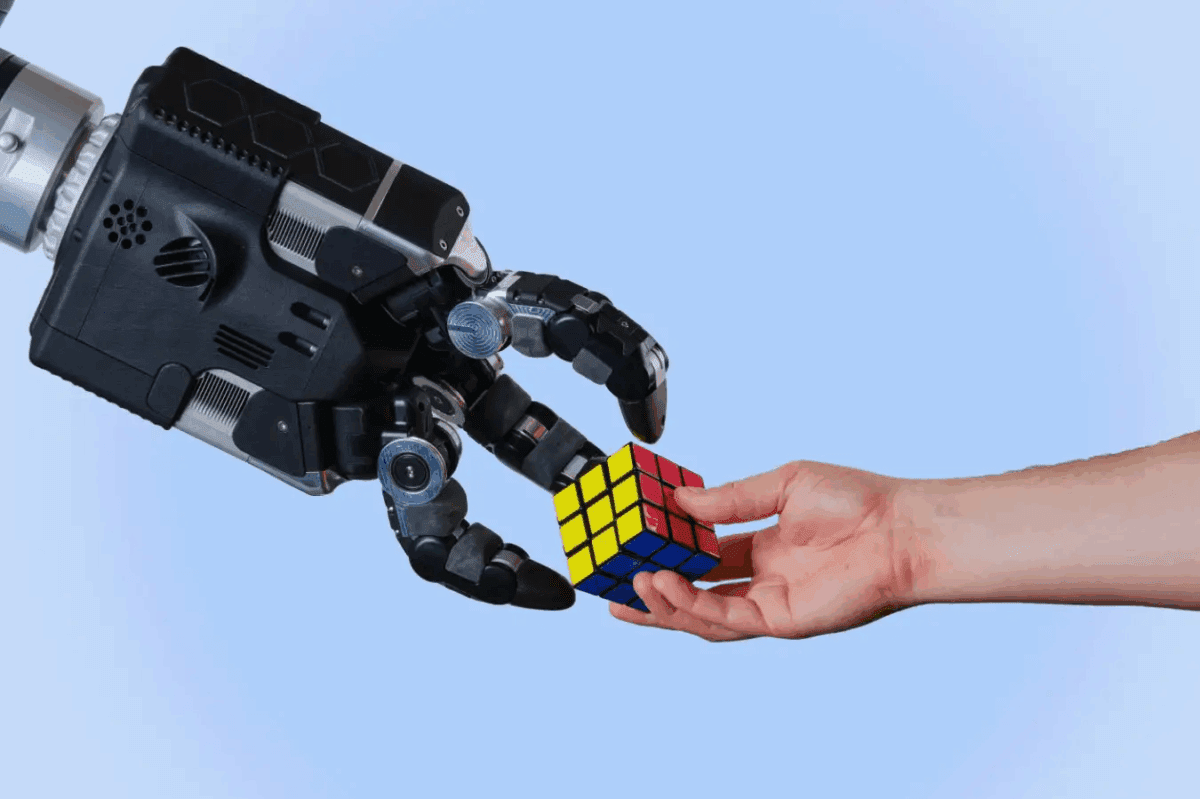
برتری Aero Hand در مواجهه با اشکال غیرمعمول از طراحی زیرفعالسازانه (مکانیزم کنترل سادهتر) آن سرچشمه میگیرد. در این سیستم، بهجای استفاده از موتورهای جداگانه در هر مفصل، کابلهایی از میان انگشتان عبور میکند که با یک کشش واحد، چند بخش را بهطور همزمان خم میکند. نتیجه، انطباق طبیعی دست با شکل اجسام است. همین ویژگی باعث میشود که در گرفتن اشیای روزمره، عملکردی دقیق و نرم داشته باشد.
تیم دونگ که سالها تجربه در توسعه رباتهای انساننما دارد، سازوکار داخلی Aero Hand را ساده کرده است تا مونتاژ آن حتی با تجهیزات ابتدایی نیز ممکن باشد. شرکت TetherIA قصد دارد با ارائه پلتفرمی کارآمد، ماژولار و مقرونبهصرفه، پژوهش در زمینه مهارتهای حرکتی رباتها را در دسترستر کند؛ پلتفرمی که میتوان آن را با چاپ سهبعدی و قطعات الکترونیکی استاندارد بازتولید کرد.
02
از 03تمرکز دست رباتیک Aero Hand Open بر سادگی
در حالی که بسیاری از دستهای رباتیک موجود برای عملکرد خود به موتورهای اختصاصی و پرهزینه یا سازوکارهای پیچیده مکانیکی وابسته هستند، Aero Hand Open مسیر متفاوتی را با تمرکز بر سادگی، دوام و شفافیت در پیش گرفته است. در این طرح، هر مفصل با بهرهگیری از مکانیزم تاندونی بهینهسازی شده است تا حرکتی نرم، طبیعی و دقیق را فراهم کند، در حالی که ساختار کلی دستگاه سبک و جمعوجور باقی میماند. این سامانه از میانافزار متنباز مبتنی بر ESP32 و نرمافزار کنترل سازگار با ROS2 استفاده میکند و به گفته تیم توسعه، بهراحتی میتواند در پروژههای پژوهشی و آموزشی بهکار گرفته شود.
طبق اطلاعات منتشرشده در گیتهاب، این مخزن به عنوان یک مرجع جامع و در دسترس برای توسعهدهندگان، دانشجویان و علاقهمندان حوزه رباتیک طراحی شده است تا راه را برای تحقیقات باز و نوآورانه هموار کند.
03
از 03حرکات نرم و طبیعی با معماری تاندونی
دست رباتیک جدید TetherIA که بر پایه معماری تاندونی طراحی شده است، حرکاتی نرم، طبیعی و هماهنگ با ساختار انسانی ارائه میدهد. این دست که با فناوری چاپ سهبعدی تولید شده، بهسادگی سرهم میشود و به لطف طراحی سبک و جمعوجور خود، استفاده از آن بسیار آسان است. همچنین نوآوری تازه TetherIA از نظر اقتصادی نیز مقرونبهصرفه است؛ چرا که کیت کامل آن تنها با قیمت 314 دلار عرضه میشود.
شرکت سازنده اعلام کرده است که ماژول کنترل از راه دور این سیستم (Teleoperation Module) امکان هدایت بلادرنگ Aero Hand Open را از طریق دستکشهای هوشمند، بازوهای رباتیکی یا رابطهای مشابه فراهم میسازد. به این ترتیب، کاربران میتوانند حرکات واقعی انگشتان خود را به شکل مستقیم به دست رباتیک منتقل کنند و آزمایشهایی دقیق در زمینه گرفتن و تعامل با اشیا انجام دهند.
با وجود این، شرکت TetherIA هشدار داده است که قطعات چاپشده سهبعدی ممکن است بسته به نوع چاپگر و جنس مواد، تفاوتهایی در دقت داشته باشند. همچنین مکانیزم تاندونی نیازمند تنظیم منظم کشش کابلها است تا حرکات دست روان و دقیق باقی بماند. اعمال فشار یا گشتاور بیش از اندازه نیز میتواند باعث تغییر شکل قطعات یا آسیب به آنها شود.