فهرست مطالب
نخستین اسکلت خارجی رباتیک با کاهش مصرف هوا و فشار عضلانی، توانایی غواصان را افزایش میدهد و کاربردهای گسترده زیرآبی دارد.
به گزارش سرویس فناوری تکناک، پیشرفتی تازه در حوزه رباتیک پوشیدنی میتواند عملکرد انسان را در محیطهای زیرآبی افزایش دهد. پژوهشگران چینی برای نخستین بار یک اسکلت خارجی رباتیک زیرآبی ساختهاند؛ سامانهای که بهطور خاص برای پشتیبانی از حرکت زانوی غواصان طراحی شده است. این فناوری که به وسیله تیمی از دانشگاه پکن به سرپرستی پروفسور وانگ چینگ ساخته شده، قرار است فشار جسمی غواصان را (از جمله مصرف هوا و بار وارد بر عضلات) بهطور محسوسی کاهش دهد.
پژوهشگران بیان کردند: «با کاهش بار فیزیکی و مصرف اکسیژن، چنین سیستمهایی میتوانند زمان حضور زیر آب را افزایش دهند، ایمنی را بالا ببرند و خستگی را به حداقل برسانند.» این دستاورد میتواند افقهای تازهای را برای پژوهشهای دریایی، پروژههای ساختوساز زیرآبی و آموزش حرفهای غواصان بگشاید.
01
از 02غلبه بر چالشهای غواصی در اعماق دریا
انسانها برای راه رفتن روی زمین بهینه شدهاند و همین مسیر تکاملی باعث شده است که آنها در غواصی ناکارآمد باشند و برای طی همان مسافت زیر آب، انرژی بیشتری صرف کنند. محیط آبی با ایجاد موانع گسترده، نهتنها حرکت زیر آب را دشوار میکند، بلکه استفاده موثر از فناوریهای کمکی را نیز به چالش میکشد. حرکت در زیر آب بهمراتب انرژی بیشتری نسبت به راه رفتن روی زمین میطلبد، چرا که غواصان باید به طور مداوم با مقاومت آب مقابله کنند. این فشار مستمر، محدوده عملیاتی و استقامت غواصان را محدود میکند. انتقال فناوری اسکلت خارجی رباتیک به محیط زیر آب با سالها چالش و پژوهش مستمر به دست آمده است. ریشه این دشواری در نیازهای بیومکانیکی خاص شنا و ضربه زدن با پا، همراه با فشارهای منحصربهفرد محیط مایع نهفته است.
بیشتر بخوانید: سیکو ساعت غواصی اتوماتیک جدید با صفحه اسکلتی عرضه میکند
حتما بخوانید: لباسهای غواصی مقاوم در برابر گاز کوسه؛ امیدی تازه برای ایمنی در دریا + ویدیو
02
از 02چگونگی عملکرد اسکلت خارجی رباتیک
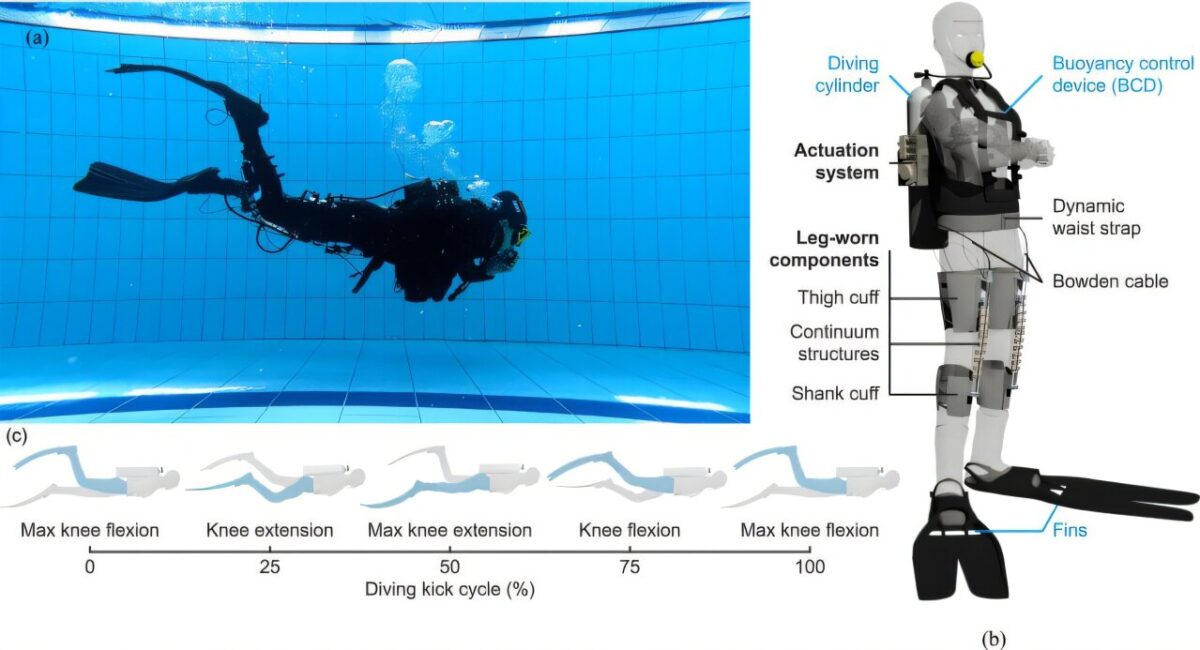
این فناوری یک اسکلت خارجی زیرآبی با مکانیزم کابل دوطرفه است، که به غواصان کمک میکند حرکات پای خود را بهینه کنند. اسکلت با اعمال گشتاور کمکی در لحظه، بهویژه در حرکات flutter kick (روش اصلی پیشرانش در غواصی با باله) عمل میکند. سنسورهای حرکتی پیشرفته و سیستم کنترل مبتنی بر نیرو، اسکلت را با حرکات طبیعی غواص هماهنگ میسازند و تجربهای روان و طبیعی ایجاد میکنند.
کارایی این دستگاه در آزمایش با شش غواص حرفهای بررسی شد و نتایج نشان داد که استفاده از اسکلت خارجی رباتیک باعث افزایش بهرهوری و کاهش مصرف انرژی نسبت به غواصی بدون دستگاه شد. مصرف هوا در غواصان به میزان قابل توجه ۲۲.۷ درصد کاهش یافت و فشار بر عضلات پا نیز کاهش چشمگیری داشت؛ فعالیت عضلات چهارسر ۲۰.۹ درصد و عضلات ساق ۲۰.۶ درصد کم شد. نکته مهم، سازگاری غواصان با کمک مکانیکی اسکلت و حفظ الگوهای طبیعی حرکتی بود، که در مجموع باعث بهبود قابل توجه صرفهجویی انرژی زیر آب شد.
با بهکارگیری گسترده، این اسکلت میتواند هم عملکرد غواصان را ارتقا دهد و هم فشار جسمی آنها را به شکل چشمگیری کاهش دهد.
این اسکلت خارجی رباتیک میتواند ارزش عملی بالایی برای پژوهشهای دریایی و انجام عملیات پیچیده زیر آب داشته باشد. با وجود این، تاثیر آن به مراتب فراتر از کاربردهای کنونی است.
بر اساس اطلاعیه مطبوعاتی، این دستگاه بینشهای جدید و ارزشمندی در زمینه تکنیکهای آموزش غواصان و بیومکانیک انسان زیر آب ارائه میدهد و ابزاری قدرتمند برای مطالعه و بهینهسازی حرکت در محیطهای آبی فراهم میکند. پیشرفتهای پیشین در این حوزه شامل ارائه طرحهایی از اسکلتهای بیرونی الهامگرفته از زیستشناسی دریایی بوده است؛ این لباسهای رباتیک برای تقویت قدرت کاربران و تقلید از سبکهای شنای بسیار کارآمد حیوانات دریایی مانند: پنگوئن، دلفین و لاکپشت طراحی شده بودند.
نتایج این تحقیقات در تاریخ ۱۴ اکتبر ۲۰۲۵ در نشریه معتبر IEEE Transactions on Robotics منتشر شد.