فهرست مطالب
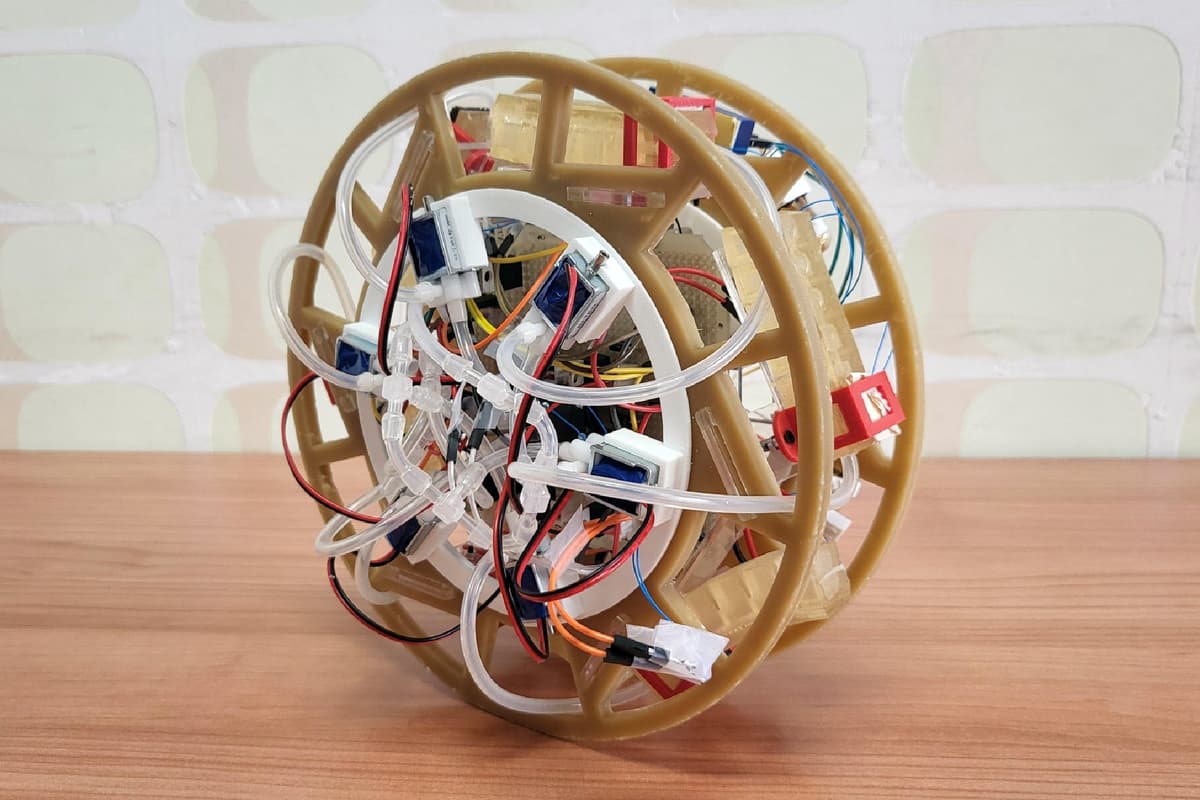
محققان در حال ساخت رباتهای خوراکی هستند، که در طیف گستردهای از کاربردهای بالقوه مانند سلامت و تغذیۀ انسان، حفظ حیات وحش ، رفاه حیوانات و محیط زیست نقش خواهند داشت.
به گزارش تکناک، دانشمندان در گذشته موفق به ساخت اجزای رباتیک خوراکی شده بودند. اکنون هدف دانشمندان ادغام این اجزای رباتیک با یکدیگر است که میتواند در طیف گستردهای از کاربردها، مثل ارائه مراقبتهای درمانی تا نظارت بر محیطزیست، مورد استفاده قرار گیرد.
تصور کنید که سفارش غذای خود را با پهپاد تحویل بگیرید و بعد از خوردن غذا، پهپادی که غذا را به شما تحویل داد را هم برای دسر میل کنید. قسمت اول (تحویل غذا با پهباد) مدتی است که در حال تبدیل شدن به واقعیت است. بر اساس گفتۀ دانشمندان مؤسسۀ فناوری فدرال سوئیس (EPFL ) دومین ربات خوراکی جهان به زودی عرضه خواهد شد.
داریو فلورانو، نویسندۀ اصلی این مقاله گفت: همآمیزی رباتها و غذا یک موضوع دشوار امّا جذاب است. ما هنوز در حال کشف این موضوع هستیم که کدام مواد خوراکی، مشابه مواد غیرخوراکی عمل میکنند.
در نگاه اول، به نظر میرسد غذا و رباتها در دو طرف طیف علمی گوناگون قرار دارند. امّا به گفتۀ محققان، رباتهای خوراکی موضوع جدیدی نیستند و نقش مؤثری در زمینههای مختلفی مانند سلامت و تغذیۀ انسان، حفظ حیات وحش و رفاه حیوانات و محیطزیست دارند.
01
از 02جدول زمانی توسعۀ رباتهای خوراکی
پتانسیل زیادی در رباتهای خوراکی وجود دارد که همین موضوع باعث شد در سال 2021، فلورانو به همراه محققانی به نامهای رمکو بوم از دانشگاه واخنینگن در هلند، جاناتان روسیتر از دانشگاه بریستول و ماریو کایرونی از مؤسسۀ فناوری ایتالیا (IIT)، پروژهای به نام RoboFood را راهاندازی کنند. این پروژه با حمایت بودجۀ اتحادیه اروپا به میزان 3.5 میلیون یورو (3.75 میلیون دلار آمریکا) در مدت چهار سال انجام شد.
بر اساس نتایج منتشر شده در وبسایت RoboFood، هدف کلی این پروژه پیادهسازی پایههای علمی و فناوری برای توسعۀ رباتهای خوراکی و مواد غذایی رباتیک است. به این منظور، بیایید به جدول زمانی توسعۀ رباتهای خوراکی نگاه کنیم که مانند بسیاری از موارد مرتبط با فناوری، با سرعتی زیاد در حال پیشرفت است.
در سال 2017، دانشمندان EPFL گیرهای ساختند که میتواند سیب را از طریق دو محرک کاملاً خوراکی کنترل کند. خود محرکها از مواد ژلاتین-گلیسرول با ویژگیهای مکانیکی مانند آنچه در الاستومرهای سیلیکونی یافت میشد، ساخته شده بود.
دانشمندان EPFL و Wageningen در سال 2022 یک پهپاد با بال ثابت و با بالهای ساخته شده از رایس کیک پف کرده و چسبانده شده با ژلاتین به یکدیگر را طراحی کردند. البته فقط بالهای پهپاد خوراکی بودند، امّا میتوانست با سرعت 33 فوت (10 متر) در ثانیه پرواز کند و قادر به حمل 50 درصد از جرم خود به عنوان محمولۀ خوراکی بود.
در سال 2023، محققان IIT با ساختن یک آند از ریبوفلاوین (ویتامینB2) و یک کاتد از کوئرستین که یک رنگدانۀ طبیعی سلامتبخش موجود در پیاز قرمز و کلمپیچ است، یک باتری قابل شارژ خوراکی ساختند. زغال فعال رسانایی را افزایش میدهد، در حالی که جلبک دریایی نوری (موادی است که معمولاً دور رولهای سوشی پیچیده میشود)، برای جلوگیری از اتصال کوتاه مورد استفاده است. باتری بستهبندی شده با موم زنبور عسل با ولتاژ 0.65 ولت کار میکند که یک ولتاژ مطمئن برای مصرف میباشد. این باتری دوتایی است که به صورت سری به هم متصل شدهاند و یک LED را برای حدود 10 دقیقه تغذیه میکنند.
در سال 2024، دانشمندان دانشگاه بریستون، IIT و EPFL اولین حسگر کرنش خوراکی را بر اساس هدایت الکترونیکی ایجاد کردند. نکتۀ اصلی ساخت آن یک جوهر رسانای جدید میباشد که ترکیبی از کربن فعال، پاستیل خرسی هاریبو، مخلوط آب و اتانول است. هنگامی که جوهر بر روی یک بستر خوراکی اسپری میشود، هر دو را میتوان خورد.
02
از 02موانع و محدودیتها
بوکئون کواک، یکی از نویسندگان این مقاله عنوان کرد: تحقیقات زیادی در مورد اجزای خوراکی منفرد مانند محرکها، حسگرها و باتریها وجود دارد، امّا بزرگترین مانع فنی، کنار هم قرار دادن قطعاتی است که از برق برای عملکرد خود استفاده میکنند، مثل باتریها و حسگرها با قطعاتی که از مایعات و فشار برای حرکت بهره میگیرند.
محققان در مقالۀ خود، چالشهایی که در حال حاضر برای تحقق رباتهای خوراکی با آن مواجه هستند را بیان میکنند. محرکها و باتریهای خوراکی موجود هنوز در مقایسه با نمونههای غیرخوراکی خود، قدرت، استقامت و قابلیت اطمینان کمتری دارند یا نیاز به استفاده از قطعات غیرخوراکی هستند. چالش دیگر این است که اگرچه بسیاری از اجزای خوراکی با موادی ساخته میشوند که ما معمولاً میخوریم، امّا مطالعات بیشتری برای مشاهده شیوۀ تعامل آنها با سیستم گوارشی مورد نیاز است. چالش دیگر موضوع کوچکسازی است که رباتها باید به اندازهای کوچک شوند که یک موجود واحد و قابل بلعیدن باشند. در نهایت، رباتهای خوراکی باید اهدافی را دنبال کنند.
بنابراین، محققان چه اهدافی را برای آنها پیشبینی میکنند؟ نمونههایی که آنها در مقالۀ خود آوردهاند شامل تجزیه و تحلیل دستگاه گوارش و تحویل دقیق داروها، مانور دادن به مری برای رفع انسدادهای غذایی، تغذیۀ انسان و حیوانات، حفظ سلامت حیوانات وحشی و اهلی از جمله تجویز واکسن، نظارت بر محیطزیست و ارائه یک تجربۀ جدید آشپزی است. از آنجایی که رباتهای خوراکی زیست تخریبپذیر نیز هستند، سبزتر از جایگزینهای غیر خوراکی خود خواهند بود.
اکنون سؤال بسیار مهمی که نیاز به پاسخی واضح دارد، این است که واکنش مردم به خوردن ربات چگونه خواهد بود؟ برخی از پاسخها توسط مطالعهای در سال 2024 ارائه شد که در آن محققان رباتهای ساخته شده از شکر و ژلاتین را به شرکتکنندگان دادند (که یکی از آنها متحرک و دیگری متحرک نبود) و شرکتکنندگان درک و تجربۀ طعم آنها را ارزیابی کردند. محققان متوجه شدند که ربات متحرک به عنوان یک موجود توسط شرکتکنندگان درک میشود، در حالی که ربات ثابت در نظر آنها مانند یک غذا بود. با وجود این، حرکت ربات مشخص کرد که آن هم یک ربات خوراکی است و با حرکت، مزۀ بیشتری ایجاد کرد.
ربات متحرک اغلب با طعمی شیرین توصیف شد و شرکتکنندگان در مقایسه با ربات غیر متحرک، طعمهای خاصی مانند سیب را برای آن ذکر کردند که با اجزای سازندۀ آن مطابقت داشت، که همین موضوع نشان میدهد که شرکتکنندگان متوجه شده بودند که رباتهای متحرک و غیر متحرک از مواد مختلف ساخته شده بودند. علاوه بر این، هنگام جویدن ربات متحرک، شرکتکنندگان بافتهای متفاوتی را نسبت به زمانی که ربات در حال حرکت نبود، توصیف کردند. یکی از توضیحات احتمالی ارائه شده توسط محققان این است که شرکتکنندگان ویژگیهای واقعی را به ربات در حرکت نسبت دادند و به نظر آنها این ربات زندهتر بود.
محققان در مورد اینکه چه زمانی ممکن است رباتهای خوراکی را در بشقابهای خود ببینیم، صحبتی نکردند. در حال حاضر موانع فنی ذکر شده هنوز باید برطرف شوند، امّا با توجه به سرعت پیشرفت فناوری، به احتمال زیاد این انتظار خیلی طولانی نخواهد شد.
این مقاله در مجلۀ Nature Reviews Materials منتشر شده است.