محققان دانشگاه توکیو موفق به توسعه ربات چهارپای هیبریدی پیشرفتهای به نام SPIDAR شدهاند که میتواند به طور همزمان هم در زمین بخزد و هم در هوا پرواز کند.
به گزارش تکناک، ربات SPIDAR که مخفف (Sensing, Processing, and Intelligent Dynamics for Aerial-ground Robot) است، به سیستم منحصربهفرد کنترل بردار رانش مجهز شده و انعطافپذیری و دقت حرکتی بیسابقهای را به نمایش گذاشته است.
به گفته پژوهشگران، هر یک از اندامهای SPIDAR دارای روتورهایی با قابلیت تغییر بردار رانش است، که به آن امکان میدهد به راحتی بین حالتهای حرکتی زمینی و هوایی تغییر وضعیت دهد. آزمایشهای انجامشده نشان دادهاند که این سیستم قادر به انجام پروازهای پیچیده و حرکت خزشی تکرارپذیر بوده است.

رباتهای چندمنظوره که قادر به راه رفتن و پرواز هستند، طی یک دهه گذشته پیشرفتهای چشمگیری داشتهاند. رباتهای دارای پا به دلیل توانایی خود در جابهجایی اشیا و حرکت در محیطهای ناهموار، همواره مورد توجه بودهاند. طراحی با تعداد پای بیشتر نیز باعث افزایش پایداری و سازگاری آنها شده است.
بر اساس این دستاوردها، محققان دانشگاه توکیو ربات SPIDAR را طراحی کردند، که مجهز به روتورهای بردارده در هر بخش از اندامها است و میتواند هم در زمین راه برود و هم در آسمان پرواز کند. هرچند نمونههای اولیه تنها قادر به انجام حرکات پایه بودند و از نظر کارایی انرژی و کنترل حرکات پیچیده مفاصل، محدودیتهایی داشتند.
یکی از مشکلات اصلی این ربات، تداخل آیرودینامیکی بین روتورهای عمودی در هنگام پرواز و گرفتن اشیا بود. پژوهشگران برای رفع این چالش، یک تکنیک کنترل بهینه ارائه دادند، که محدودههای عملکرد روتورها را بهگونهای تنظیم میکند که از تداخل جریان هوا جلوگیری شود.
سرووهای مفاصل SPIDAR به دلیل سبک بودن طراحی، توان کافی برای تولید گشتاور مورد نیاز را نداشتند. تیم تحقیقاتی با طراحی الگوریتمی نوآورانه موفق به ایجاد الگوی حرکتی خزنده شد، که در آن هر دو پا به طور همزمان و بدون نیاز به بلند کردن تنه حرکت میکنند. همچنین ترکیبی از کنترل رانش و گشتاور برای بهبود تعادل و کاهش مصرف انرژی ارائه شد.
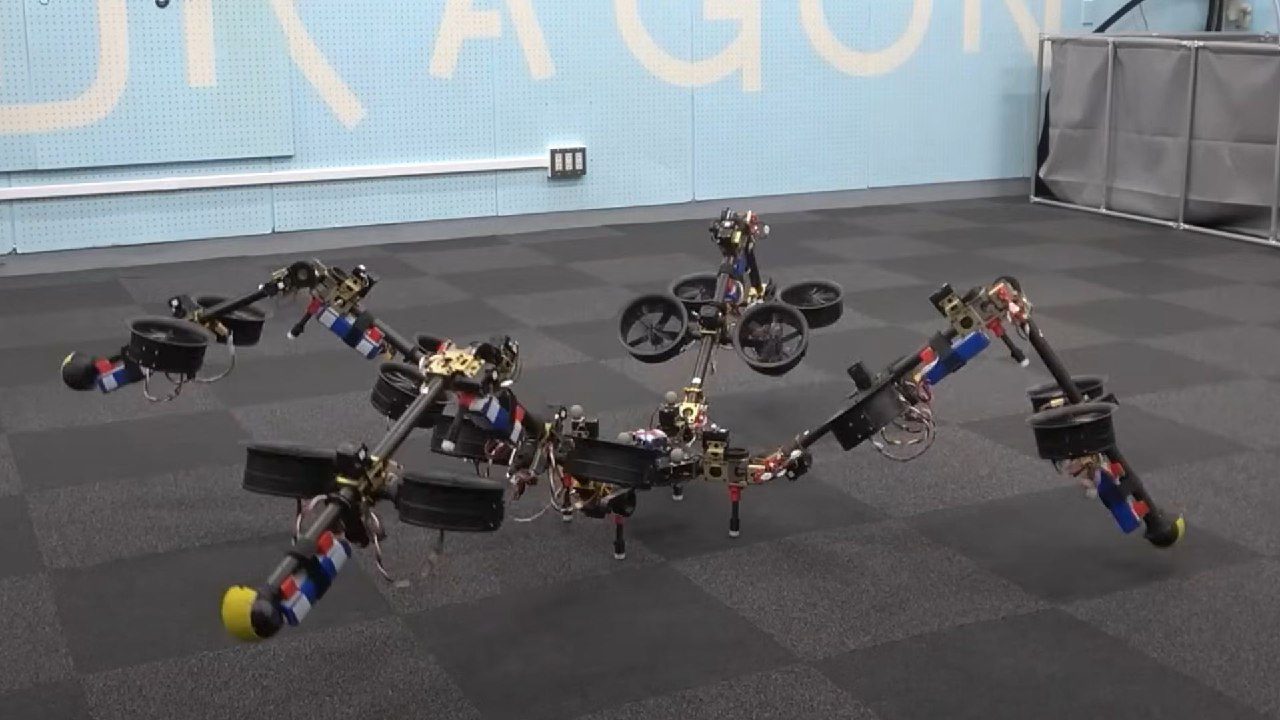
ربات SPIDAR دارای چهار اندام متقارن با قابلیت حرکت در تمام جهات است. هر پا به روتوری مجهز است که میتواند جهت و نیروی جریان هوا را تغییر دهد. این روتورها دارای دو پروانه چرخان مخالف برای جلوگیری از چرخش ناخواسته و دو موتور برای تنظیم زاویه هستند.
این ربات از مرکز ثقل خود برای هدایت حرکت بهره میبرد و سیستم کنترل آن، بدن را ثابت فرض میکند و حرکت را بر اساس محاسبات فیزیکی تنظیم مینماید. کنترلکننده PID زاویه و نیروی روتورها را برای حفظ تعادل و موقعیت پایدار تنظیم میکند و فرایند بهینهسازی، عملکرد سیستم را در چارچوب محدودیتهای موتورها بهبود میبخشد.

ربات SPIDAR در آزمایشهای انجامشده موفق به انجام حرکت خزنده پایدار و پرواز دقیق شد. طراحی سهپایه آن حتی در شرایط مختلف آزمایش پرواز، عملکرد بسیار خوبی از خود نشان داد. هرچند در آزمایش خزیدن، بلند شدن سریع پاها و ضعف سرووها باعث ناپایداری شد، اما استفاده از رانش توانست این چالش را تا حد زیادی برطرف کند.
محققان اعلام کردند که در آینده قصد دارند سیستم ساده کنترل مفاصل را با بازخورد رانش و بهرهگیری از دینامیک مفاصل جایگزین کنند. همچنین برنامههایی برای آزمایش SPIDAR در محیطهای ناهموار مانند: پلهها و افزودن قابلیت گرفتن اجسام با کل بدن به منظور نمایش کامل توانمندیهای حرکتی و دستکاری آن در دست اجرا است.
این پروژه گامی نوین در توسعه رباتهای چندحالته محسوب میشود و میتواند در آینده، کاربردهای گستردهای در زمینههای امداد و نجات، اکتشاف و خدمات صنعتی داشته باشد.


















