فهرست مطالب
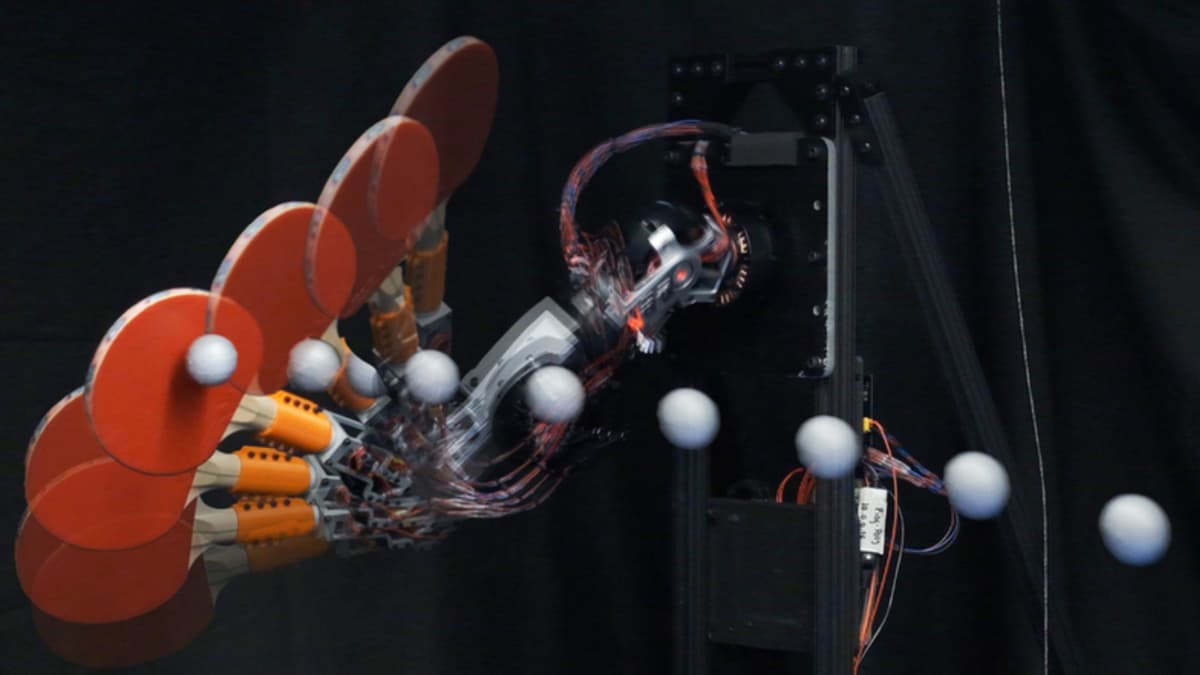
گروهی از پژوهشگران مؤسسه فناوری ماساچوست (MIT) بازویی رباتیک طراحی کردهاند که در یک طرف میز پینگپنگ قرار میگیرد و با استفاده از یک راکت استاندارد، توپهای دریافتی را با دقت بالا باز میگرداند.
به گزارش تکناک، این ربات به کمک دوربینهای فوق سریع و سیستم کنترل پیشرفته، مسیر توپ را پیشبینی کرده و نحوه بهینه ضربه را محاسبه میکند.
01
از 06دقت ۸۸ درصدی در واکنش به ۱۵۰ توپ پیاپی
در آزمایش اولیه، دانشمندان ۱۵۰ توپ را به سمت این بازوی رباتیک پرتاب کردند. این بازوی رباتیک توانست با میانگین دقت ۸۸٪ آنها را مهار کند. درصد موفقیت ربات در انواع مختلف ضربه به این صورت بود:
- ۸۸.۴٪ برای ضربات چرخشی رو به جلو (تاپاسپین)
- ۸۹.۲٪ برای ضربات چرخشی رو به عقب (بکاسپین)
- ۸۷.۵٪ برای ضربات مستقیم
میانگین سرعت ضربه بازوی رباتیک ۱۱ متر بر ثانیه بود که در تستهای بهروزرسانیشده تا ۱۹ متر بر ثانیه نیز افزایش یافت. این سرعت با بازیکنان حرفهای انسانی رقابت میکند و از تمام رباتهای پینگپنگ قبلی سریعتر است.
02
از 06تمرین ورزشی با ربات
به گفته تیم تحقیقاتی، این پروژه فقط درباره بازی نیست. هدف اصلی، توسعه بازوهای رباتیکی است که در سیستمهای آموزش واکنش و مقابله با شرایط پویا در زمان واقعی به کار گرفته شوند.
03
از 06تعادل میان دقت و چابکی
رباتهای پینگپنگباز چیز تازهای نیستند، اما دانشمندان MIT در تلاشند تا تعادلی بین دو قابلیت مهم در رباتیک ایجاد کنند:
- کنترل دقیق و آهسته برای کارهایی مانند گرفتن اشیاء
- حرکات پرانرژی و سریع مانند دویدن یا پریدن
برخلاف رباتهای گوگل دیپمایند یا Omron که با هوش مصنوعی آموزش دیدهاند، ربات MIT بر اساس پیشبینی و کنترل آنی در زمان واقعی عمل میکند.
04
از 06کاربردهای فراتر از پینگپنگ
کندریک کانسیو، یکی دیگر از پژوهشگران توسعهدهنده این ربات میگوید: ربات ما فقط برای بازی طراحی نشده؛ بلکه ما به دنبال توسعه یک سیستم عمومیتر هستیم که بتواند در رباتهای انساننما و کاربردهای مختلف مورد استفاده قرار گیرد.
این بازو رباتیک از پروژه MIT Humanoid اقتباس شده که رباتی انساننما با قابلیت دویدن، پریدن و حتی پشتک زدن است. در نسخه فعلی، بازو رباتیک دارای چهار مفصل اصلی و یک مفصل اضافی در مچ برای کنترل بهتر راکت است.
05
از 06آینده ربات
آخرین نسخه ربات MIT حتی قادر به نشانهگیری هدفمند است. با استفاده از الگوریتمهای پیشرفته، محل فرود توپ را پیشبینی کرده و نوع ضربه را تنظیم میکند. به گفته تیم پژوهشی، این قابلیت آن را به ابزار مؤثری برای تمرین بازیکنان تبدیل میکند.
در حال حاضر، دامنه حرکتی این بازو رباتیک محدود به بخش هلالی میز پینگپونگ است، اما برنامههایی برای نصب آن روی یک سکوی متحرک یا چرخدار وجود دارد تا دامنه پوشش آن افزایش یابد.
06
از 06ارائه در کنفرانس جهانی ICRA
این پروژه قرار است در کنفرانس بینالمللی IEEE در زمینه رباتیک و اتوماسیون (ICRA) در ماه جاری ارائه شود. پژوهشگران امیدوارند یافتههای این پروژه، مسیر توسعه رباتهایی با مهارتهای واقعی انسانی را هموار کند.