فهرست مطالب
گروهی از محققان موفق به طراحی یک ربات چهارپای بدون موتور شدهاند که دویدن یک سگ را شبیهسازی میکند.
به گزارش تکناک، این ربات با ترکیبی از فناوری یادگیری ماشینی و سیستمهای مکانیکی پیشرفته طراحی شده است و حرکات طبیعی حیوانات را با دقت بالا تقلید میکند.
01
از 09تحرک الهامگرفته از بیومکانیک سگها
محققان دانشگاههای TU Delft و EPFL با استفاده از یادگیری ماشینی برای تحلیل حرکت سگها، سیستمی شامل فنرها، کابلها و محرکهای همزمان طراحی کردهاند، که به ربات امکان میدهد روی تردمیل راه برود و به تغییرات سرعت واکنش نشان دهد. این طراحی، حداقل استفاده از موتورها را به دنبال دارد، که تنها در مواقعی مانند بالا رفتن یا اجتناب از موانع استفاده میشود.
02
از 09هدفگذاری برای رباتهای تطبیقپذیر
دلا سانتینا، استاد بخش CoR دانشگاه TU Delft در بیانیهای گفت: «هدف ما توسعه رباتهای چهارپایی است که نه تنها کارآمدتر هستند، بلکه میتوانند به خوبی با محیطهای پیچیده، تطبیق پیدا کنند.»
03
از 09قابلیتهای مکانیکی الهامگرفته از طبیعت
حیوانات چهارپا از ساختارهای خاص مانند: تاندونهای انعطافپذیر و ویژگیهای بیومکانیکی خود برای حرکت بهینه در انواع زمینها استفاده میکنند. محققان این قابلیتها را در رباتهای خود با طراحیهای انعطافپذیر بازسازی کردهاند تا این رباتها بتوانند برای کارهایی مانند: کاوش، جستوجو و نجات، عملکرد مؤثری داشته باشند.
04
از 09معرفی ربات بدون موتور PAWS
ربات چهارپای PAWS توسط محققان دانشگاههای TU Delft و EPFL طراحی شده است. این ربات با چهار موتور ساخته شده است که میتواند ۱۲ حرکت مختلف را کنترل کند. طراحی این ربات بر اساس اطلاعاتی از نحوه حرکت سگها انجام شده است و میتواند چهار نوع حرکت مختلف را اجرا کند. این سیستم به ربات اجازه میدهد تا حرکات طبیعی و انعطافپذیری مانند: نشستن، پریدن و دویدن را انجام دهد.
05
از 09الگوی حرکتی پیشرفته ربات بدون موتور PAWS
ربات PAWS میتواند حرکات پیچیده و واکنشهای شبیه به حیوانات را به خوبی انجام دهد. این حرکات با استفاده از تکنیکی به نام سینماتیک معکوس (IK) صورت میگیرند، که به ربات اجازه میدهد تا رفتارهای متنوع و مقاومی داشته باشد. برای تحلیل حرکات مفاصل سگها، از روشی به نام تحلیل مؤلفههای اصلی (PCA) استفاده شده است، که به محققان کمک میکند الگوهای اصلی حرکت را شناسایی کنند.

06
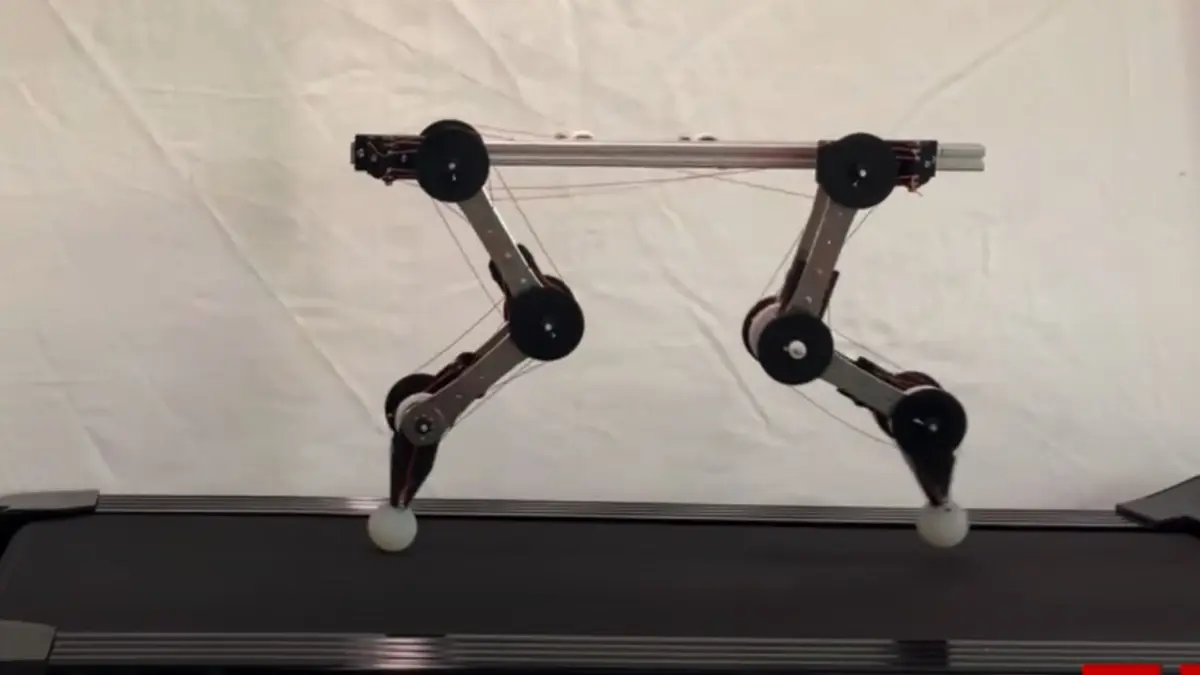
از 09تطبیقپذیری مکانیکی بالای ربات بدون موتور PAWS
ربات PAWS ویژگیهای غیرفعال خارقالعادهای دارد. زمانی که این ربات بدون فعالسازی موتور روی یک تردمیل قرار گرفت، توانست به طور خودجوش یک گام شبیه دویدن نمایش دهد، که نشاندهنده مقاومت در برابر اختلالات خارجی و سازگاری با تغییرات سرعت بود.
07
از 09طراحی بهینه مبتنی بر بیومکانیک
با تحلیل دادههای تجربی، مسیر دهی تاندونها، قطرهای قرقرهها و سختی مفاصل در طراحی ربات بهینهسازی شدند تا حرکات بیولوژیکی حیوانات تقلید شود. سیستم کنترل الگو نیز باعث بهبود گامهای طبیعی ربات از جمله راهرفتن، دویدن و نشستن شده است.
08
از 09رفتار تطبیقپذیر و مقاوم ربات بدون موتور PAWS
ربات PAWS به لطف طراحی انعطافپذیر خود، توانایی بازگشت به گام پایدار در برابر اختلالات فیزیکی را دارد. این ویژگی باعث میشود ربات در تعامل با محیط، رفتارهای مقاوم ارائه کند.
09
از 09چشمانداز آینده در طراحی رباتها
این مطالعه قابلیت بالای طراحی مبتنی بر همافزایی را نشان میدهد و میتواند باعث تولید رباتهای مقاوم، کارآمد و تطبیقپذیر برای کاربردهای مختلف شود. این نوآوری گامی بلند در حرکت به سوی نسل جدید رباتهای هوشمند محسوب میشود.




















