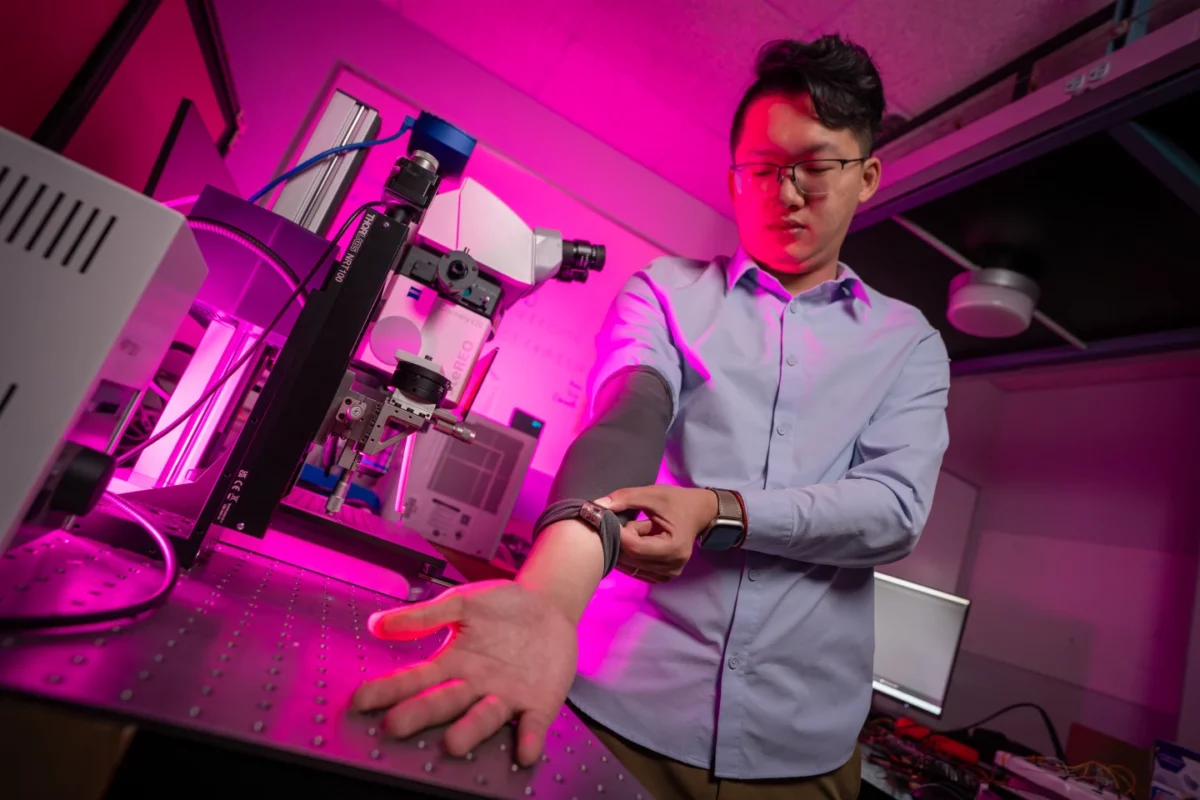
پژوهشگران دانشگاه کالیفرنیا سندیگو از توسعهٔ یک رابط انسان–ماشین پوشیدنی در قالب بازوبند الکترونیکی خبر دادند که امکان کنترل حرکتی دقیق را حتی در شرایط لرزش، حرکت شدید و ناپایداری محیطی فراهم میکند.
به گزارش سرویس فناوری تکناک،این دستاورد علمی در قالب مقالهای در نشریهٔ Nature Sensors منتشر شده و توسط تیمی از پژوهشگران دانشگاه کالیفرنیا سندیگو ارائه شده است. هدف اصلی این پژوهش، حل یکی از چالشهای قدیمی در حوزهٔ کنترلهای حرکتی بوده است. این چالش به ناتوانی سامانههای پوشیدنی در تشخیص دقیق ژستهای انسانی هنگام حرکت، لرزش یا اختلالات حرکتی بازمیگردد.
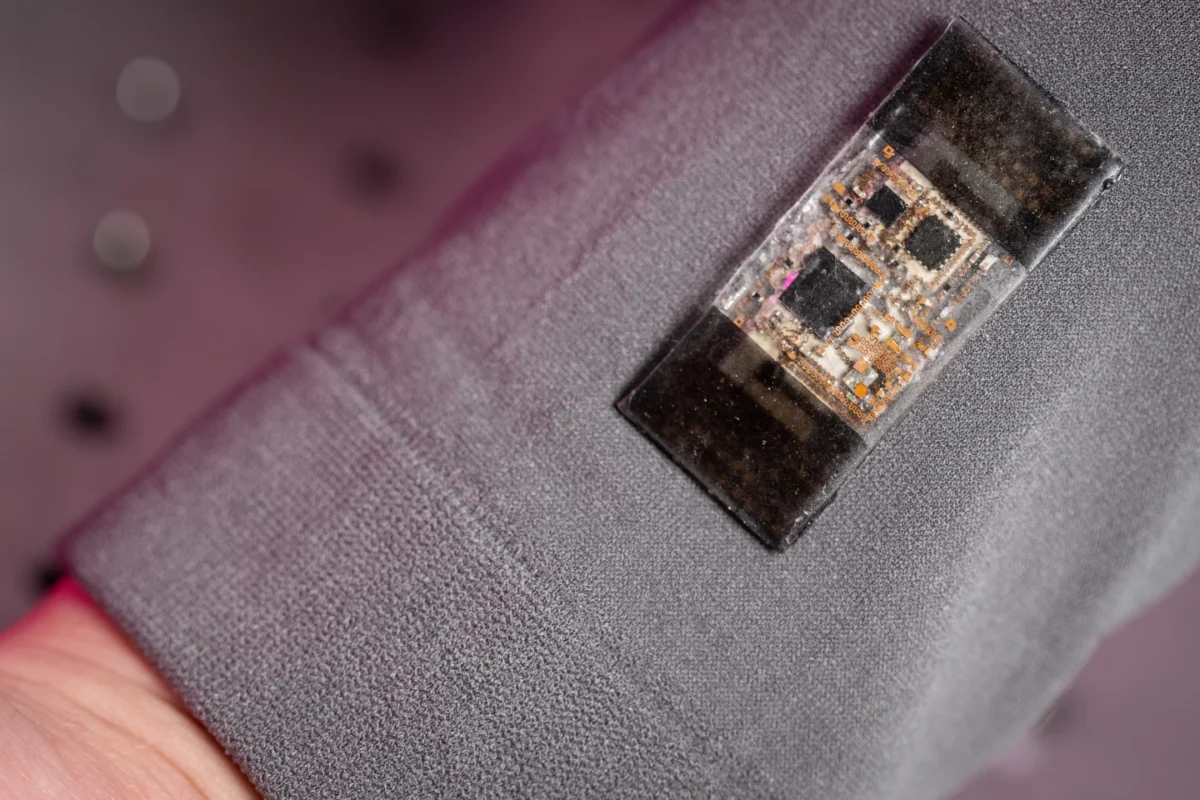
پژوهشگران در این پروژه یک بازوبند الکترونیکی طراحی کردند که ترکیبی از حسگرهای حرکتی و عضلانی، ارتباط بلوتوث و یک باتری کشسان را در خود جای میدهد. این سامانه با استفاده از الگوریتمهای یادگیری عمیق، نویز دادههای حسگرها را بهصورت بلادرنگ حذف میکند. در نتیجه، حرکات طبیعی دست و بازو حتی در شرایط ناپایدار نیز میتوانند به فرمانهای کنترلی دقیق تبدیل شوند.
بیشتر بخوانید: جهش چین در رابط مغز و رایانه؛ کنترل رباتها تنها با فکر
شیانگجون چن، پژوهشگر پسادکتری و نویسندهٔ همرهبر این مطالعه، اعلام کرد که تیم او دادههای نویزی ناشی از تکانخوردن بدن، لرزش عضلات یا حرکات غیرارادی را با روشهای مبتنی بر هوش مصنوعی پاکسازی کرده است. این رویکرد به دستگاه اجازه میدهد ژستهای روزمره را بهطور قابلاعتماد برای کنترل ماشینها و رباتها به کار بگیرد، حتی در محیطهایی که حرکت شدید در آنها اجتنابناپذیر است.
پژوهش حاضر با همکاری آزمایشگاههای شنگ شو و جوزف وانگ در دانشگاه کالیفرنیا سندیگو انجام شده و از حمایت مالی آژانس پروژههای پژوهشی پیشرفتهٔ دفاعی ایالات متحده برخوردار بوده است. Defense Advanced Research Projects Agency در مراحل اولیه از این پروژه پشتیبانی کرد، زیرا پژوهشگران قصد داشتند توانایی غواصان نظامی را برای کنترل رباتهای زیرآبی در شرایط دشوار افزایش دهند.
با پیشرفت پروژه، تیم تحقیقاتی دریافت که کاربرد این فناوری محدود به مصارف نظامی نیست. پژوهشگران اعلام کردند که کاربران عادی نیز برای استفاده از ابزارهای پوشیدنی به کنترلهایی مقاوم در برابر ضربه و لرزش نیاز دارند. این نیاز بهویژه در سالهای اخیر و با رشد سریع فناوریهای پوشیدنی بیشتر احساس شده است.
چن توضیح داد که این پژوهش یک روش جدید برای افزایش تحمل نویز در حسگرهای پوشیدنی ارائه میدهد. به گفتهٔ او، این فناوری مسیر توسعهٔ نسل بعدی سامانههای پوشیدنی را هموار میکند. این سامانهها میتوانند همزمان کشسان، بیسیم و سازگار با محیطهای پیچیده باشند و از الگوهای حرکتی هر کاربر نیز یاد بگیرند.
دستگاه طراحیشده با تکیه بر یک پایگاه دادهٔ گسترده از شرایط واقعی، سیگنالهای بازو را تحلیل میکند. این پایگاه داده شامل الگوهای حرکتی انسان در خشکی و دریا است. سامانه با استفاده از پلتفرم یادگیری عمیق اختصاصی خود، تشخیصهای نادرست را حذف میکند و فرمانهای کنترلی آنی را برای سامانههایی مانند بازوهای رباتیک ارسال میکند.
بیشتر بخوانید: این ربات میکروسکوپی خودمختار انرژی خود را از نور تأمین می کند
برای ارزیابی عملکرد این فناوری، پژوهشگران آزمایشهایی را در شرایط مختلف انجام دادند. آزمودنیها هنگام دویدن یا در معرض لرزش، تکانهای شدید و ارتعاشات با فرکانس بالا از این بازوبند استفاده کردند. بخشی از این آزمایشها در شبیهساز پژوهش اقیانوس–جو اسکریپس انجام شد که در مؤسسهٔ Scripps Institution of Oceanography قرار دارد. نتایج نشان داد که سامانه در همهٔ شرایط، عملکردی دقیق و با تأخیر بسیار کم ارائه میدهد.
پژوهشگران معتقدند این دستگاه نخستین کنترل پوشیدنی مبتنی بر ژست حرکتی است که میتواند مشکل نویز دادههای ناشی از تلاطم و حرکت را بهطور مؤثر برطرف کند. این موضوع باعث میشود چنین سامانههایی از محیطهای آزمایشگاهی فراتر بروند و در دنیای واقعی نیز قابل استفاده باشند.
کاربردهای احتمالی این فناوری گسترده توصیف شده است. پژوهشگران اعلام کردند که کارکنان کارخانهها و نیروهای امدادی میتوانند با استفاده از این سامانه، رباتها، ابزارها و وسایل نقلیه را بدون نیاز به دست کنترل کنند. این قابلیت حتی در سرعتهای بالا یا شرایط خطرناک نیز قابل استفاده خواهد بود.
علاوه بر این، بیماران در حال توانبخشی یا افراد دارای ناتوانیهای حرکتی میتوانند از این فناوری بهره ببرند. این افراد میتوانند سامانه را با ژستهای طبیعی خود آموزش دهند و بدون نیاز به بازیابی کامل مهارتهای حرکتی ظریف، از کنترل دقیق برخوردار شوند.
چن در پایان تأکید کرد که این پیشرفت علمی، گامی مهم در مسیر توسعهٔ رابطهای انسان–ماشین شهودی و مقاوم به شمار میرود. به گفتهٔ او، چنین رابطهایی میتوانند در آیندهٔ نزدیک به بخشی از زندگی روزمرهٔ کاربران تبدیل شوند.