شرکت رباتیک LimX Dynamics که در سال ۲۰۲۲ در چین تأسیس شده، ویدیویی از ربات انساننمای خود به نام Oli در حال انجام حرکات خودکار و دقیق منتشر کرده است.
به گزارش تکناک، این ربات با بهرهگیری از هوش تجسمیافته، بدون نیاز به کنترل از راه دور یا دادههای موشنکپچر، به طور مستقل توپهای تنیس را شناسایی و جمعآوری میکند. در ویدیو، Oli با دقت و هماهنگی بالا توپها را در سبد مخصوص قرار میدهد و توانایی درک محیط را بهخوبی به نمایش میگذارد. این نمایش، جهشی چشمگیر در فناوری حرکت خودکار و ادراک محیطی محسوب میشود و این ربات را در میان رباتهای انساننمای پیشرفته و آیندهدار جهان قرار میدهد.
در آغاز ویدیو، فردی توپ تنیس را در برابر ربات تکان میدهد و سر Oli بهنرمی مسیر آن را دنبال میکند؛ حرکتی که دقت بصری لحظهای ربات را به خوبی نشان میدهد. سپس توپ روی زمین میافتد و ربات چند گام به جلو برمیدارد، وضعیت خود را تنظیم میکند و با دقت آن را برمیدارد. در ادامه، با تغییر موقعیت توپ، ربات دوباره حرکت میکند و خود را با موقعیت جدید وفق میدهد.
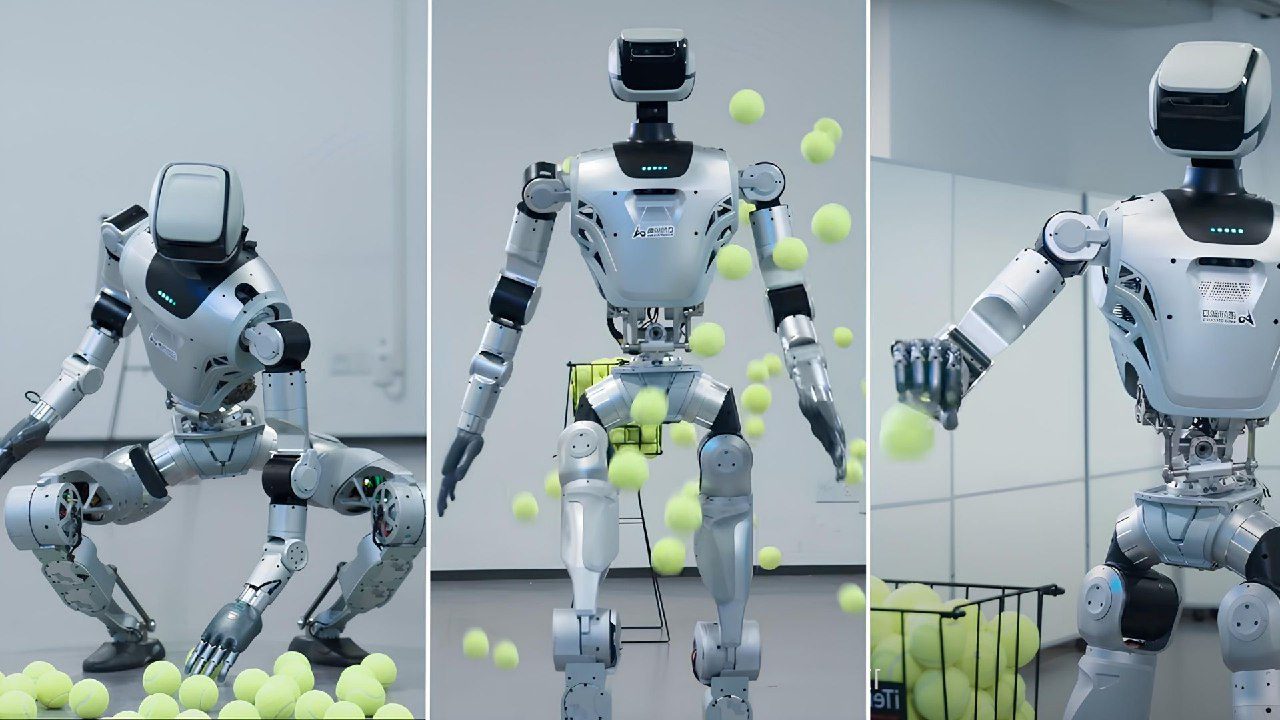
در صحنهای دیگر، دهها توپ روی زمین پخش شدهاند و ربات انساننمای Oli با نظمی مثالزدنی، یکییکی آنها را جمع میکند و در سبد مخصوص میاندازد. حرکات هماهنگ و تعادل کامل در راه رفتن، خم شدن و گذاشتن توپها، نشان از سیستم کنترلی پیشرفتهای دارد که حرکت و تعامل را بهطور همزمان مدیریت میکند.
در پایان، ویدیو با صحنهای سینمایی از حرکت آرام ربات بهسوی دوربین در میان توپهای در حال پرش به اتمام میرسد، که پایانی شاعرانه برای نمایشی از خودمختاری واقعی است.
بر اساس اطلاعات شرکت، “Oli” رباتی ۱۶۵ سانتیمتری با وزن ۵۵ کیلوگرم است، که از ۳۱ درجه آزادی حرکتی (DoF) برخوردار میباشد و میتواند به ابزارهای متنوع انتهایی برای انجام وظایف دقیق مجهز شود. طراحی ماژولار آن امکان جداسازی سریع و تغییر پیکربندی را فراهم میآورد و روند آزمایش و توسعه را تسهیل میکند.
چابکی ربات انساننمای Oli حاصل ترکیب حسگرهای دقیق با الگوریتمهای پیشرفته برنامهریزی حرکت است. پاهای ربات هرکدام دارای شش درجه آزادی هستند و بازوها و کمر نیز به تحرک طبیعی و حرکات مشابه انسان کمک میکنند.
ربات برای درک محیط، از سامانه ادغام چندحسگری بهره میبرد، که شامل IMU ششمحوره، دو دوربین عمقسنج Intel RealSense D435i و ورودی برای حسگرهایی مانند LiDAR است. این مجموعه، دید سهبعدی و قابلیت تشخیص اشیا را فراهم میسازد تا ربات بتواند در محیطهای پیچیده موقعیتیابی کند.
در زمینه ارتباط و توسعه، “Oli” از پورتهای USB 3.0/3.2، شبکه اترنت یک گیگابیتی و بسته توسعه نرمافزاری (SDK) پشتیبانی میکند، که با Python، NVIDIA Isaac Sim، MuJoCo و Gazebo سازگار است. کتابخانههای حرکتی از طریق بهروزرسانی OTA در دسترس هستند و تیم توسعه، مستندات و پشتیبانی مداوم ارائه میدهد.
شرکت LimX Dynamics هدف خود را «کاهش موانع یادگیری تقویتی» و پیشبرد انقلاب هوش تجسمیافته عنوان کرده است. نمایش جمعآوری توپهای تنیس، تجسمی از این مأموریت است، چرا که ربات انساننمای Oli صرفاً از مجموعه حرکات از پیش تعیینشده استفاده نمیکند، بلکه از سامانهای بسته مبتنی بر درک و واکنش محیطی بهره میبرد.
این ربات در کمتر از دو دقیقه، توانایی انجام «حرکت و دستکاری تمامبدنی» را به نمایش میگذارد؛ تلفیقی پیچیده از تعادل، حرکت و تعامل با اشیا که گامی بزرگ به سوی رباتهای انساننمای واقعاً خودمختار محسوب میشود.




















