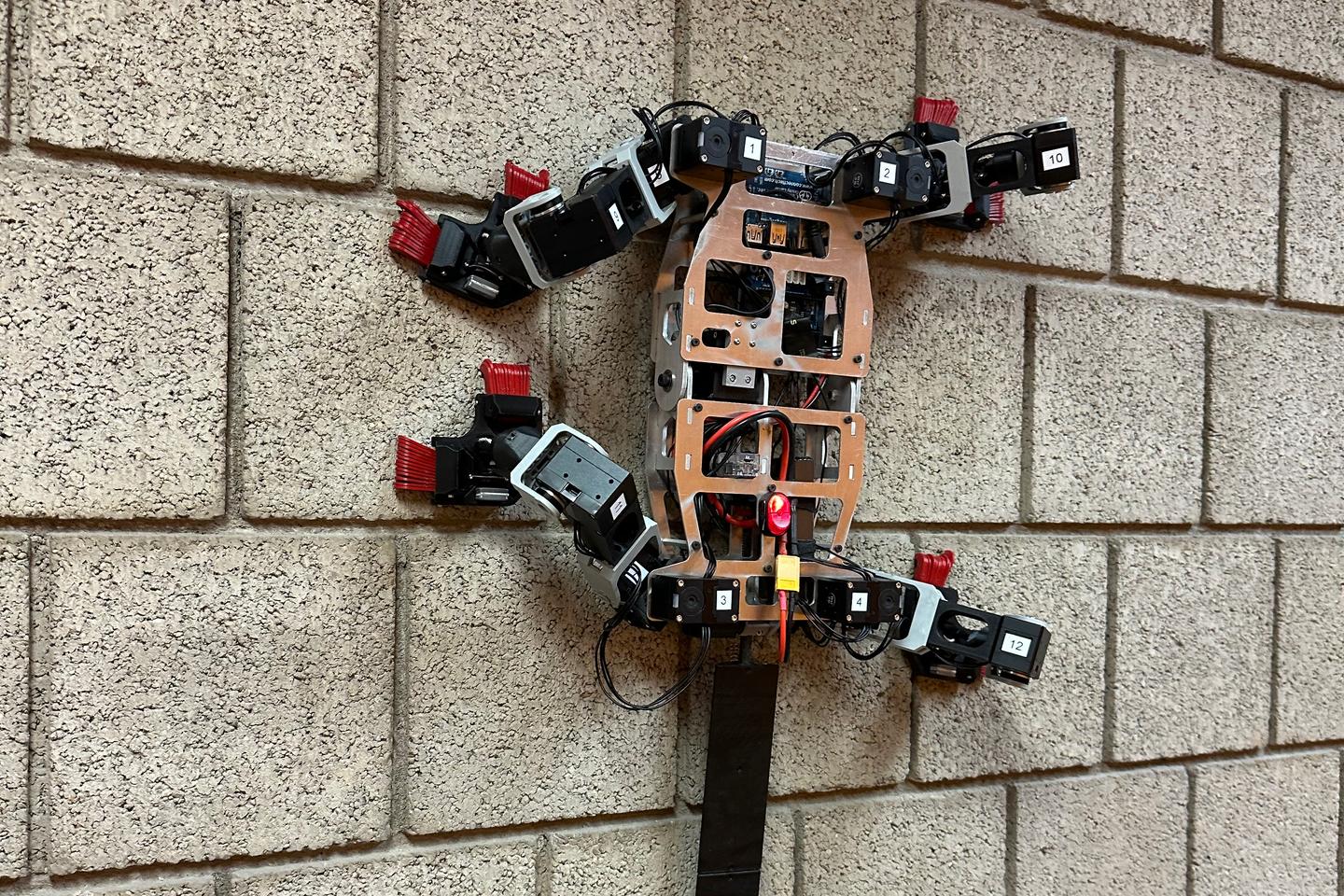
محققان دانشگاه کارنگی ملون یک ربات چهارپا به نام LORIS ساختهاند، که قادر است بر روی سطوح ناهموار به صورت عمودی بالا برود.
به گزارش تکناک، این ربات با استفاده از میکروچنگالهای فعال که دارای قلابهای ریز برای گرفتن برآمدگیهای کوچک سطح هستند، کار میکند.
LORIS با کمک دوربین عمقسنج و میکروپروسسور خود، حرکت پاهایش را به گونهای تنظیم میکند که امکان بالا رفتن از سطوح دشوار را برای او فراهم میآورد.
در حالی که برخی رباتهای آزمایشی از سیستمهای چنگ زدن مبتنی بر مکش برای بالا رفتن از سطوح صاف استفاده میکنند، چنین فناوری بر روی سطوح ناهموار مثل سنگ، یعنی جایی که نمیتوان مهر و موم ایجاد کرد، کار نمیکند.
یک جایگزین برای این حالت شامل استفاده از چیزهایی است که به عنوان گیرههای میکروسپین شناخته میشوند. این قلابها مجموعهای از قلابهای تیز کوچک را در خود جای دادهاند که گوشهها و شکافهای کوچکی را در سطح بالا میگیرند. زمانی که گیره برای برداشتن گام بعدی به سمت بالا برداشته میشود، قلابها از آن سطح رها میشوند.
برخی از گیرههای ریز بر روی ستون فقرات غیرفعال و برای حفظ استحکام به وزن بدنۀ آویزان ربات متکی هستند. این نوع گیرهها بر روی دیوارهای به نسبت مسطح کاربرد خوبی دارند، امّا در سطوح نامنظمتری مانند صخرهها نیاز به استراتژی کوهنوردی متنوعتری است و باعث کاهش عملکرد آنها میشود.
گیرههای میکروسپین فعال با ترکیب محرکهای الکتریکی که بهطور هدفمند حلقهای از قلابها را در سطح فرو میکنند، این محدودیت را دور میزنند و باعث حفظ یک نگهدارندۀ موتوری میشوند، که در هر جهت کار میکند. در اغلب موارد این میکروسپینها حجیم، تشنۀ انرژی و از نظر مکانیکی پیچیده هستند. با وجود این، سرعت صعود به نسبت آهستهای را ایجاد میکنند.
اینجاست که ربات چهارپای لوریس وارد میشود.

این ربات توسط پل نادان، اسپنسر بکوس، آرون ام. جانسون و همکارانش در آزمایشگاه روب مکانیک دانشگاه کارنگی ملون ساخته شده است.
در انتهای هر یک از چهار پایۀ ربات، یک گیرۀ ریز خاردار پراکنده قرار دارد، که شامل دو گروه از خارها است و در یک زاویۀ قائم روبهروی یکدیگر قرار گرفتهاند. گیره توسط یک مفصل مچ دست غیرفعال به ساق پا متصل میشود و به این معنی است که گیره در پاسخ به هر کاری که پا انجام میدهد، فقط به اطراف میچرخد.

ربات با استفاده از یک دوربین و ریزپردازندۀ حسگر عمق، پاهای خود را بهطور استراتژیک بهگونهای پیش میبرد که وقتی گیره روی یک پا، سطح بالا رفتن را میگیرد، گیره روی پای مخالف یعنی در طرف دیگر بدن، نیز این کار را انجام میدهد.
تا زمانی که آن دو پای متضاد به صورت مورب کشش درونی را روی گیرههای خود حفظ کنند، آن گیرهها محکم به سطح چسبیده میمانند. در همین حال، دو پای مخالف دیگر ربات، برای برداشتن گام بعدی به سمت بالا آزاد هستند. این یک استراتژی کوهنوردی با الهام از حشرات است، که به عنوان گرفتن مستقیم به داخل (DIG) شناخته میشود.
به گفتۀ محققان، لوریس وزن سبک، سرعت، بهرهوری انرژی و سادگی گیرههای میکروسپین غیرفعال را با نگه داشتن محکم و سازگاری گیرههای فعال ترکیب میکند. این ربات به گونهای طراحی شده است که ساخت آن آسان و ارزان باشد.
در ویدیوی زیر میتوانید لوریس را در حال اجرا ببینید. مقالهای در مورد این مطالعه به تازگی در کنفرانس بینالمللی رباتیک و اتوماسیون ارائه شده است.