محققان دانشگاه MIT موفق به ساخت یک دست رباتیک جدید با قابلیت حس کردن جزییات اجسام با استفاده از سه انگشت رباتیک شدند.
به گزارش تکناک، در ساخت دست رباتیک جدید آزمایشی به نام GelSight EndoFlex ، از فناوری GelSight استفاده می شود که پیش از این فقط در نوک انگشتان دست های رباتیک به کار می رفت. ساختار این دستگاه شامل سه انگشت مکانیکی EndoFlex به شکل Y است که دو انگشت در بالا و یک شست مخالف در پایین آن وجود دارد. هر یک از آنها از یک اسکلت پلیمری سخت مفصلی تشکیل شده است که درون یک لایه بیرونی نرم و انعطاف پذیر قرار گرفته است. همچنین دور هر انگشت، حسگر GelSight در قسمت زیرین و میانی تعبیه شده است.
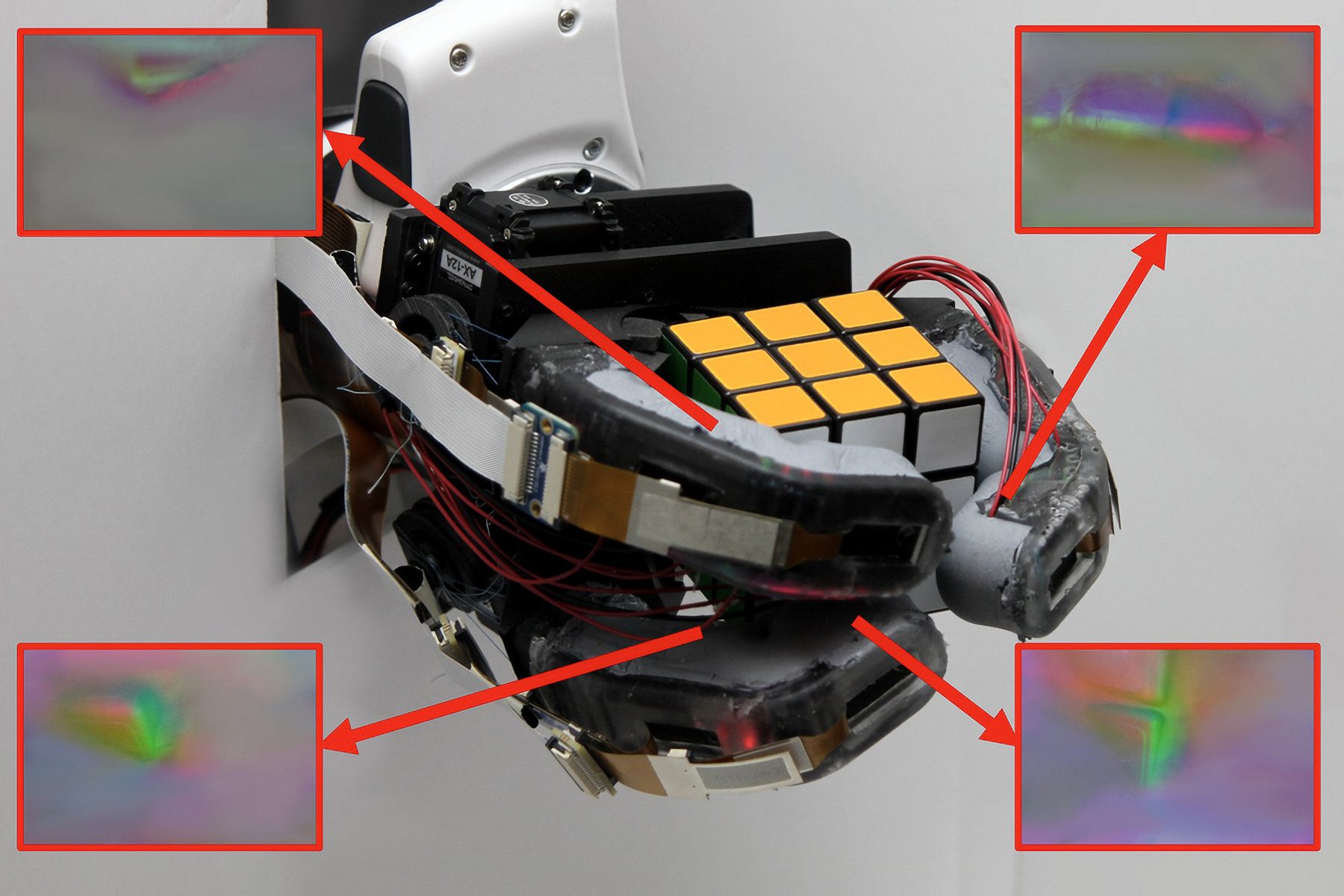
هر حسگر این دست رباتیک دارای صفحه ای از لاستیک شفاف و مصنوعی است که از یک طرف با یک لایه رنگ فلزی پوشانده شده است. رنگ به عنوان پوست انگشت عمل می کند و هنگامی که رنگ روی یک سطح فشار داده می شود، فرم آن سطح تغییر شکل می دهد. در ادامه، یک دوربین کوچک یکپارچه و مجهز به سه LED رنگی، با تصویر برداری از طرف مقابل و بدون رنگ لاستیک، می تواند خطوط کوچک سطحی را که در اثر فشار ایجاد شده است، به تصویر بکشد.
الگوریتم های ویژه ای که روی یک کامپیوتر متصل به این سیستم وجود دارد، این خطوط را به تصاویر سه بعدی تبدیل میکنند و جزئیات کمتر از یک میکرومتر در عمق و تقریباً دو میکرومتر در عرض را ثبت میکنند. رنگ برای استاندارد کردن کیفیت های نوری سطح، ضروری است تا تمرکز سیستم در مواجهه با رنگ ها یا مواد مختلف از بین نرود.
در مورد EndoFlex، با ترکیب همزمان تصاویر شش حسگر (دو عدد در هر انگشت)، می توان یک مدل سه بعدی از آیتم مورد نظر ایجاد کرد. نرمافزار مبتنی بر یادگیری ماشینی پس از اینکه دست رباتیک فقط یک بار آن جسم را گرفت، میتواند تشخیص دهد که مدل، چه جسمی را نشان میدهد. این سیستم در شکل کنونی خود تا 85 درصد دقیق است که باید با توسعه بیشتر فناوری، بهبود یابد.
پروفسور ادوارد ادلسون که این پژوهش را رهبری کرده است، گفت: داشتن عناصر نرم و سخت به صورت همزمان در هر دست رباتیک و همچنین توانایی حس کردن یک منطقه بزرگ اهمیت زیادی دارد. این ویژگی ها باعث می شود مهارت های پیچیده ای که دست انسان انجام می دهد برای دست رباتیک نیز عملی شود.
او هدف این پژوهش را ایجاد ویژگی های دست انسان در یک دست رباتیک و انجام کارهایی عنوان کرد که دست های رباتیک پیشین قادر به انجام آن نبودند.