محققان دانشگاه Ritsumeikan در ژاپن یک انگشت ریز رباتیک نرم ایجاد کردهاند که میتواند تعامل مستقیمتری با موجودات ریز جهان را فراهم کند.
به گزارش تکناک، انسان ها همیشه مجذوب تفاوت مقیاس های متفاوت با خودشان بوده اند، از اجرام غول پیکری مانند ستاره ها، سیارات و کهکشان ها گرفته تا دنیای کوچک حشرات، باکتری ها، ویروس ها و دیگر اجرام میکروسکوپی.
در حالی که میکروسکوپ به ما اجازه می دهد تا جهان میکروسکوپی را مشاهده و مشاهده کنیم، هنوز تعامل مستقیم با دنیای میکروسکوپی دشوار است.
با این حال، فناوری تعامل انسان و ربات ممکن است همه اینها را تغییر دهد. به عنوان مثال، میکروربات ها می توانند در مقیاس های بسیار کوچکتر از ما با محیط تعامل داشته باشند. میکروسنسورها برای اندازه گیری نیروهای وارد شده توسط حشرات در حین فعالیت هایی مانند پرواز یا راه رفتن استفاده شده است. بیشتر مطالعات تاکنون تنها بر روی اندازه گیری رفتار حشرات متمرکز بوده اند تا برهمکنش مستقیم حشره و میکروحسگر.
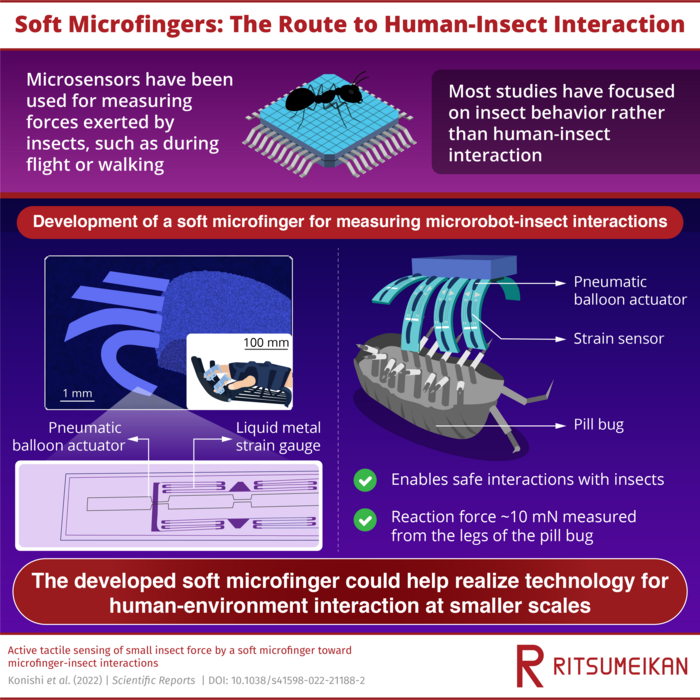
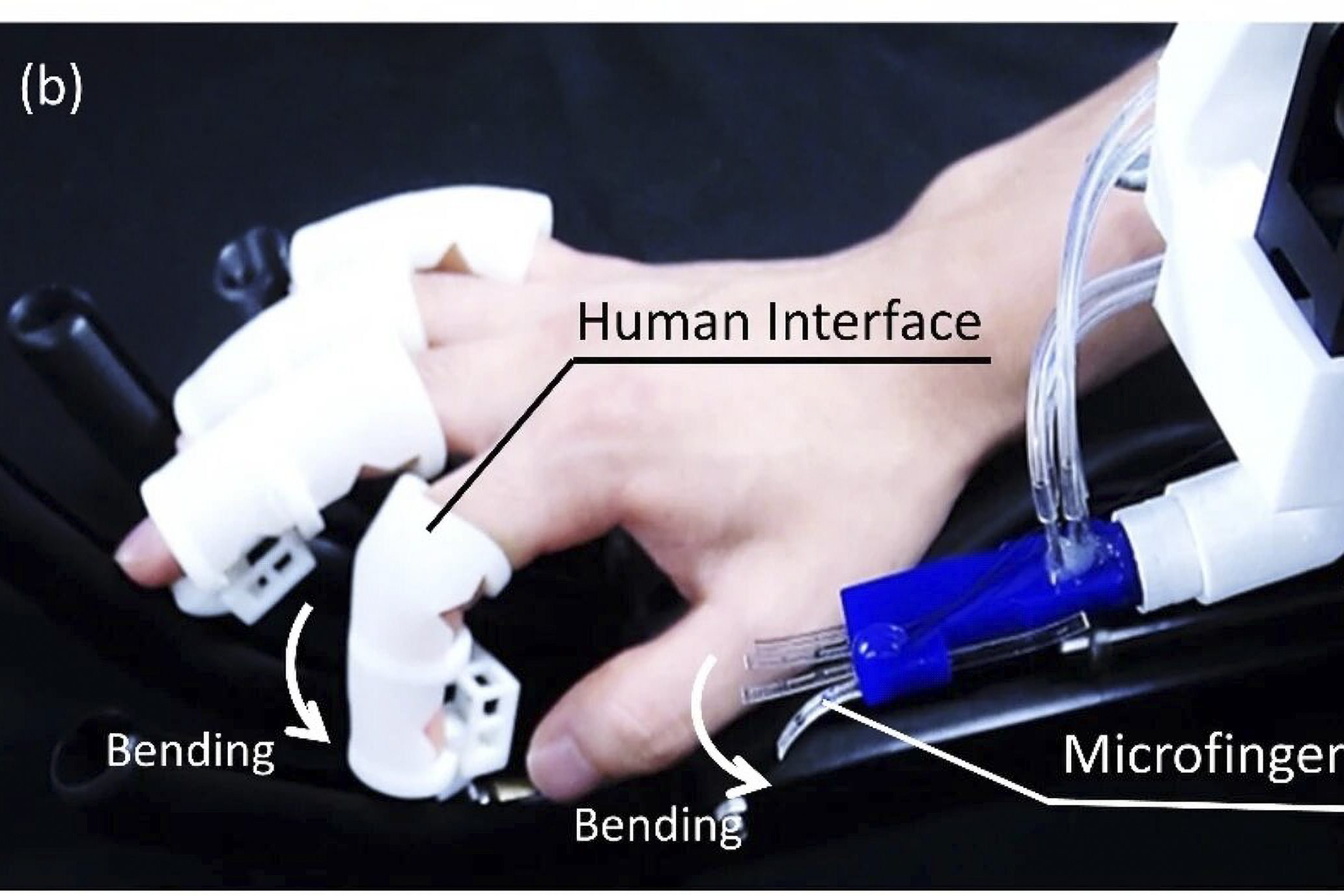
پروفسور کونیشی توضیح می دهد :در این انگشت ریز رباتیک نرم لمسی یک حسگر فشار انعطاف پذیر فلزی مایع استفاده شده است. یک محرک بالون پنوماتیک نرم به عنوان یک ماهیچه مصنوعی عمل می کند و امکان کنترل و حرکت انگشت مانند حسگر را فراهم می کند. با یک دستکش روباتیک، کاربر انسان می تواند مستقیماً ریزانگشت ها را کنترل کند. این نوع سیستم امکان تعامل امن با حشرات و سایر اشیاء میکروسکوپی را فراهم می کند.
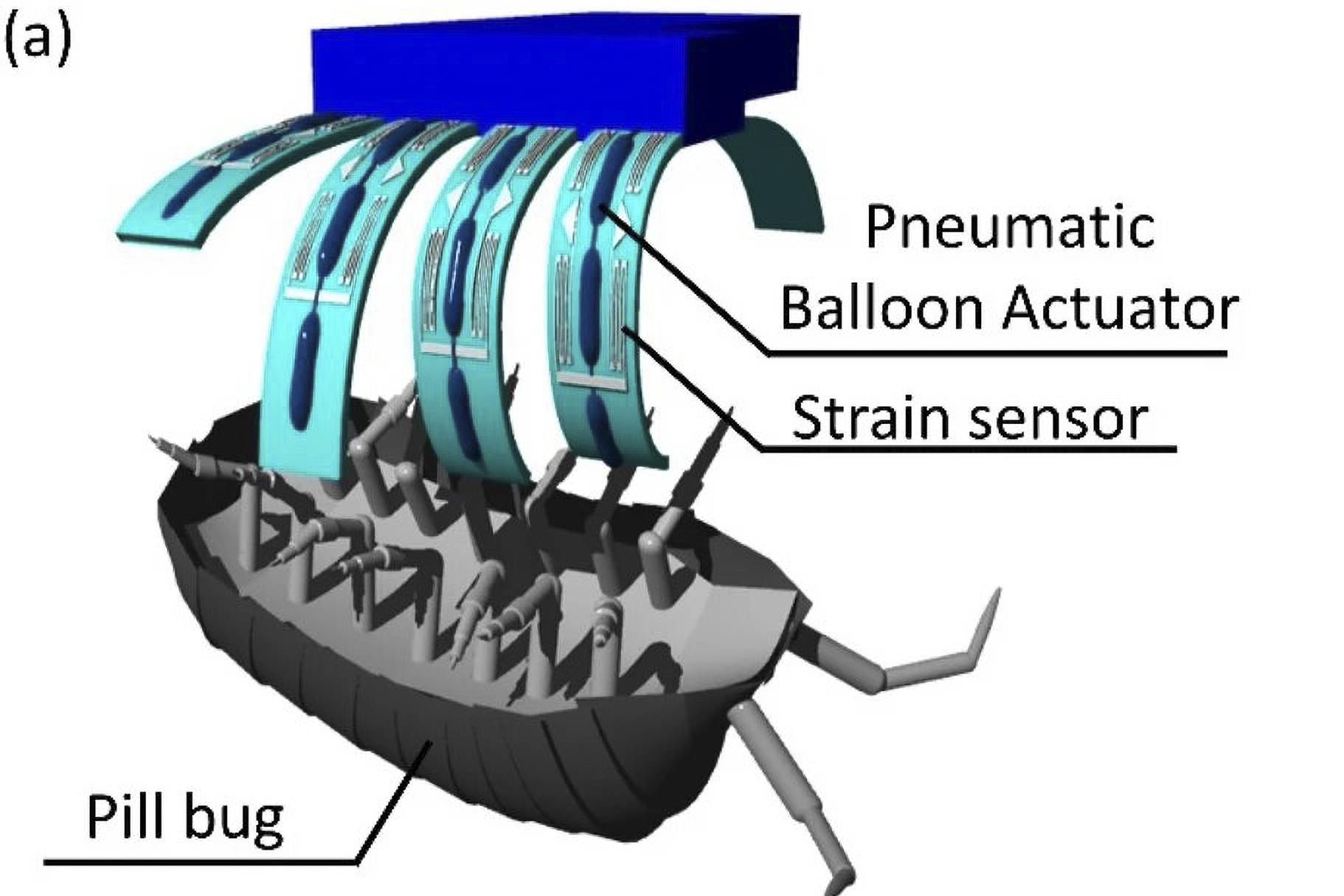
تیم تحقیقاتی با استفاده از تنظیمات میکروربات جدید خود، نیروی واکنش یک حشره قرص را به عنوان نمونه ای از یک حشره بررسی کردند. حشره قرص با استفاده از یک ابزار مکنده در جای خود ثابت شد و از میکرو انگشت برای اعمال نیرو و اندازه گیری نیروی واکنش پاهای حشره استفاده شد.
نیروی واکنش اندازه گیری شده از پاهای حشره قرص توسط این انگشت ریز رباتیک نرم تقریباً 10 میلی نیوتن (میلی نیوتن) بود که با مقادیر تخمین زده شده قبلی مطابقت داشت. این نتیجه نوید بزرگی را برای تحقق تعاملات مستقیم انسان با جهان میکروسکوپی نشان می دهد. علاوه بر این، حتی در فناوری واقعیت افزوده (AR) نیز می تواند کاربرد داشته باشد. با استفاده از دستکشهای روباتسازی شده و ابزارهای سنجش بسیار ریز مانند ریزانگشت، میتوان بسیاری از فناوریهای واقعیت افزوده مرتبط با تعاملات انسان و محیط زیست در مقیاس میکروسکوپی را تحقق بخشید.
پروفسور کونیشی در انتها می گوید: با انگشت ریز رباتیک نرم حساس به فشار، توانستیم مستقیماً حرکت فشاری و نیروی پاها و تنه یک حشره قرص را اندازه گیری کنیم چیزی که قبلاً دستیابی به آن غیرممکن بوده است.
ما پیشبینی میکنیم که نتایج ما منجر به توسعه فناوری بیشتر برای تعاملات ریزانگشت و حشره شود که منجر به تعاملات انسان و محیط در مقیاسهای بسیار کوچکتر شود.