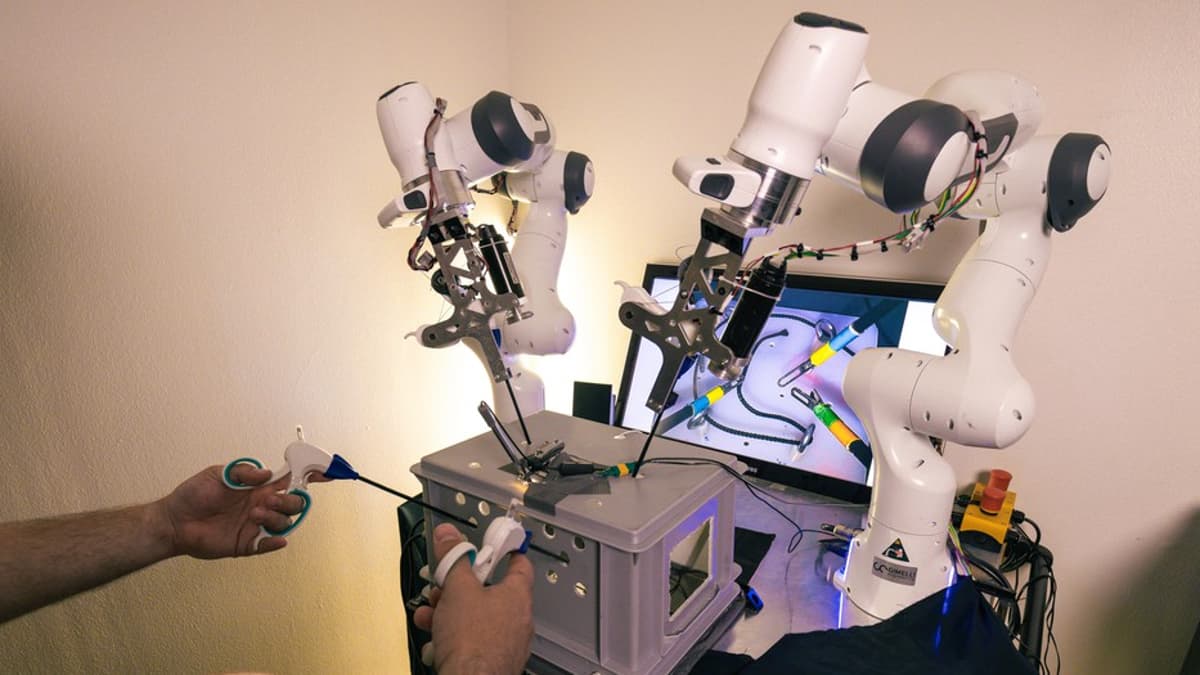
ربات لاپاراسکوپی چهار بازویی توسط دانشمندان مؤسسه تحقیقاتی EPFL سوئیس در حال توسعه است که به فرد جراح اجازه میدهد تا کاری را انجام دهد که معمولاً توسط دو یا گاهی سه نفر انجام میشود.
به گزارش تکناک، سیستم های جراحی رباتیک دو بازویی مانند داوینچی ایکس که توسط دو دست جراح کنترل می شوند بسیار تحسین بر انگیز هستند. با این وجود، یک سیستم آزمایشی جدید با اضافه کردن دو بازوی دیگر که توسط پاهای کاربر کنترل می شوند، همه چیز را حتی فراتر می برد.
هر یک از دستهای کاربر یک کنترلر جداگانه را میگیرد که شبیه دستههای قیچی است. با استفاده از اینها، می توان همزمان هر دو بازوی رباتیک اصلی را که هر یک می توانند ابزار جراحی اولیه متفاوتی مانند اسکالپل را در دست بگیرند، هدایت کرد.
ضمنا هر یک از پاهای کاربر روی یک پدال جداگانه قرار می گیرد. یکی از این پدالها بازوی ثانویه کوچکتری را که دوربین آندوسکوپی را نگه میدارد، کنترل میکند، در حالی که دیگری بازوی دیگری را کنترل میکند که یک گیره را نگه میدارد. عملکرها در هر دو پدال بازخورد لمسی را ارائه می دهند و اقدامات جراح را به گونه ای هدایت می کنند که نیروی زیادی را در نواحی ظریف بدن بیمار اعمال نکنند.
بدیهی است که کار با چهار ابزار به طور همزمان می تواند بسیار خسته کننده و گیج کننده باشد. به همین دلیل، این سیستم قادر است برخی از اقدامات اساسی جراح را پیش بینی کند و بر این اساس حرکات آنها را هدایت می کند.
به عنوان مثال، اگر یک گره در یک بخیه بسته می شود، آندوسکوپ می تواند به طور خودکار در موقعیتی حرکت کند تا بهترین دید را ارائه دهد، در حالی که گیره را می توان از مسیر خارج کرد.
محمد بوری، رئیس گروه REHAssist در EPFL گفت: سیستم ما امکانات جدیدی را برای جراحان فراهم میکند تا با انجام روشهای لاپاراسکوپی با چهار دست، به فرد اجازه میدهد تا کاری را انجام دهد که معمولاً توسط دو یا گاهی سه نفر انجام میشود.
آزمایشات بالینی این فناوری در حال حاضر در ژنو در حال انجام است. مقاله ای در مورد این سیستم، که توسط دانشجویان دکترا، جاکوب هرناندز و ولید امانهود رهبری می شد، اخیراً در مجله بین المللی تحقیقات رباتیک منتشر شد.