
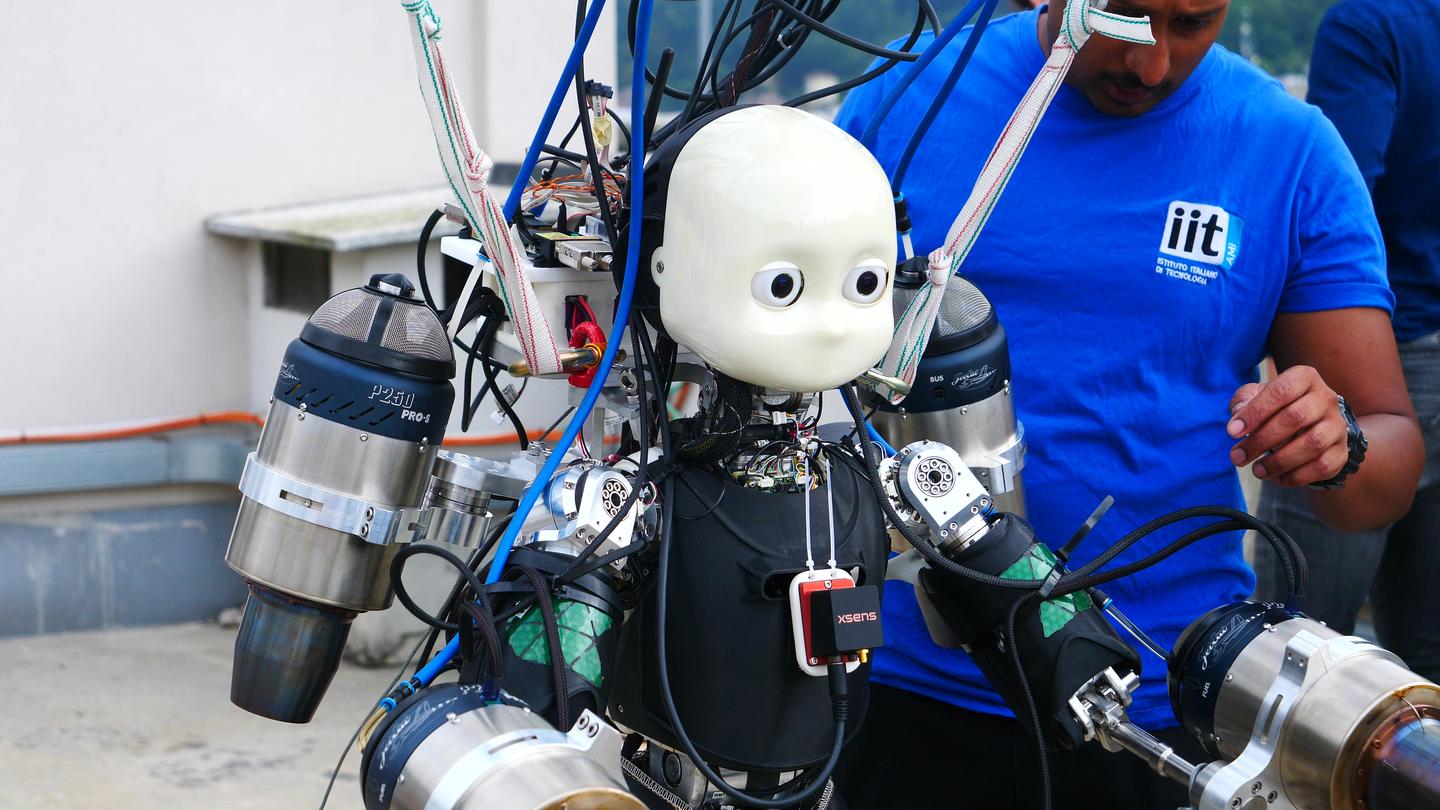
محققان گروه هوش مصنوعی و مکانیکی در مؤسسه فناوری ایتالیا (Istituto Italiano di Tecnologia)، در حال ساخت یک ربات انساننمای پرنده هستند تا در امدادهای اضطراری هوایی کمککننده باشد.
به گزارش تکناک، تصور کنید که در یک مسیر کوهستانی دور افتاده مجروح شدهاید، اما موفق میشوید که با امداد اضطراری تماس بگیرید. اگر تحقیقات محققان ایتالیایی به نتیجه برسد، ممکن است اولین کسی که در آن مسیر کوهستانی به داد شما میرسد، یک ربات انساننمای کوچک باشد که یک جتپک به تن دارد.
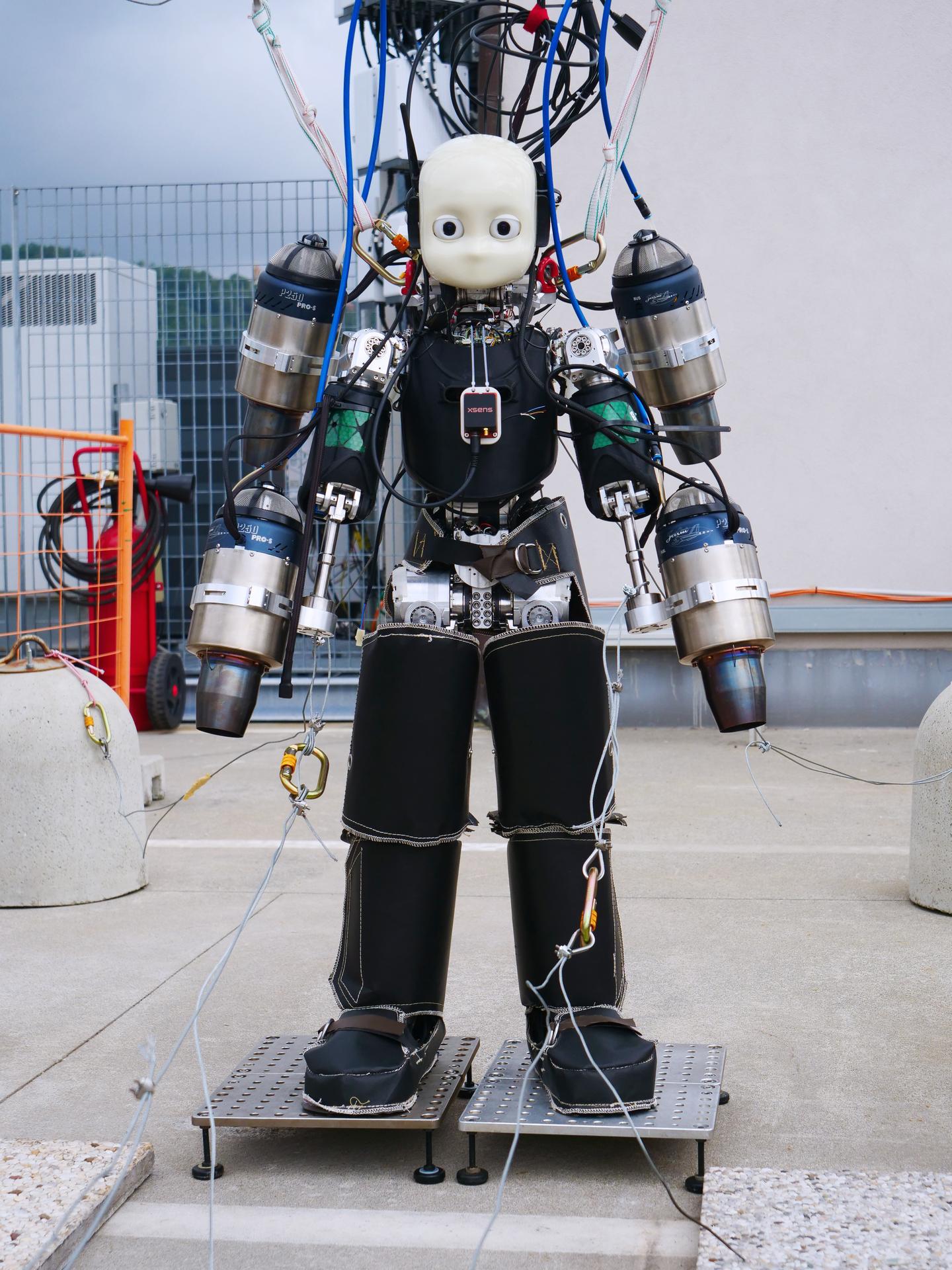
این ربات انساننمای پرنده شبیه یک کودک طراحی شده است و هدف محققان این است که آن را با استفاده از نیروی جت از زمین بلند کنند.
این تیم علاوه بر بستن یک جتپک دوقلو به پشت این ربات، دستهای انسانمانند منعطف ربات اصلی را به جتکتهای آتشزا مجهز کردند.
محققان میگویند که در این جتکتهای آتشزا، نیروی رانش به حداکثر 1000 نیوتن میرسد و دمای اگزوز میتواند تا 800 درجه سانتیگراد بالا برود.
این ربات انساننما، iRonCub3 نام دارد و الهام گرفته از شخصیت «تونی استارک» داستانهای مارول است.
این ربات انساننما از یک ستون تیتانیومی جدید ساخته شده است تا به کمک آن با نیروهای موجود مقابله کند و به جای یک لباس بیرونی نامناسب که در نمونه اولیه قبلی به چشم میخورد، این ربات مجهز به روکشهای مقاوم در برابر حرارت است.
همچنین در این ربات انساننما وسایل الکترونیکی جدید طراحی شدهاند. به عنوان مثال حسگرهای نیروی گشتاور در جتپک نصب و اجزای آن حذف شدهاند تا راه را برای سیستم بهروز شده باز کنند.
این پروژه هنوز در مراحل اولیه توسعه است، اما این تیم در گذشته رباتهای انساننما با نیروی جت را در یک تونل بادی آزمایش کردهاند تا شبیهسازیهای هوا را تأیید کنند.
ربات iRonCub3 تاکنون هنوز از روی زمین بلند نشده است، اما محققان میگویند که به زودی این ربات انساننما به کمک جتپکهای خود به آسمان میرود.
تاکنون الگوریتمهای کنترل پرواز، توسعه و تحلیل شدهاند و یک برنامهریز مسیر در شبیهسازیها اعتبارسنجی شده است.
این تیم در حال حاضر روی تخمین موقعیت و جهتگیری ربات در فضا با استفاده از دادههای واحد اندازهگیری اینرسی و دوربین عمقسنج واقعی Real Sense کار میکنند.
محققان میگویند که پیچیدگی این محور تحقیقاتی بسیار متفاوت از چالشهای کلاسیک رباتیک انساننما است.
ترمودینامیک نقش محوری دارد، چرا که گاز خروجی توربین حدود 800 درجه سانتیگراد و با سرعت صوت است.
آیرودینامیک سیستمهای چند بدنه، نیاز به شبکههای عصبی با اجزای مبتنی بر فیزیک دارد که به صورت آنلاین ارزیابی شوند.
تنظیمات کنترلر باید ترکیبی از عملگرهای پهنای باند بالا و پایین را به عنوان مفاصل و توربینها داشته باشد.
برنامهریزان باید نه تنها دینامیک موتور، بلکه مسیرهای توربین را نیز تولید کنند.
اعتبارسنجی تجربی هم جدی و خطرناک است، بنابراین جایی برای بداههپردازی وجود ندارد.
هدف نهایی محققان این است که رباتهای انساننمایی بسازند که میتوانند برای انجام بازرسیهای هوایی به مکانهای اضطراری/فاجعه پرواز کنند، یا دادههای کلیدی را به پرسنل راه دور ارائه دهند.
همچنین قابلیتهایی مانند: فرود آمدن و راه رفتن، از روی موانع حرکت کردن، از پلهها بالا رفتن، بازکردن درها و غیره را داشته باشد.
همانطور که قبلا پیشنهاد شده است، این ربات انساننما میتواند برای نجاتهای اولیه در صحنه و برای بازرسی ساختمانها یا زیرساختهای خطرناک مفید باشد.
منبع: Italian Institute of Technology



















