روباتهای بدون باتری، موتور یا وسایل الکترونیکی ممکن است توان کمی داشته باشند، اما یک گیربکس کوچک که توسط یک میدان مغناطیسی خارجی هدایت میشود، یک ربات نرم را قادر ساخت تا تقریباً 40 برابر ارتفاع خود بپرد و کارایی بیشتری پیدا کند.
به گزارش تک ناک، گیربکسی که توسط یک میدان مغناطیسی خارجی هدایت میشود، میتواند به رباتهای کوچک اما قدرتمندی را با وجود نداشتن باتری یا موتور که مانند کرم صد پا میخزند یا تقریباً 40 برابر قد خود میپرند،توان بیافزاید.
این فناوری می تواند به ساخت روبات های پزشکی که می توانند در بدن انسان حرکت کنند، نمونه برداری کنند یا دارو را تحویل دهند کمک زیادی می کند.
رباتهای نرم – که باتری، موتور یا وسایل الکترونیکی ندارند و از راه دور با نور یا آهنربا نیرورسانی و کنترل میشوند، یک موضوع تحقیقاتی محبوب هستند زیرا سادگی این ربات ها امکان ساخت آها را در سایز های بسیار کوچک فراهم می کند. اما زمانی که این کار مستلزم سوراخ کردن پوست یا باز کردن حفره های فرو ریخته است، این ربات ها کار آیی لازم را ندارند.
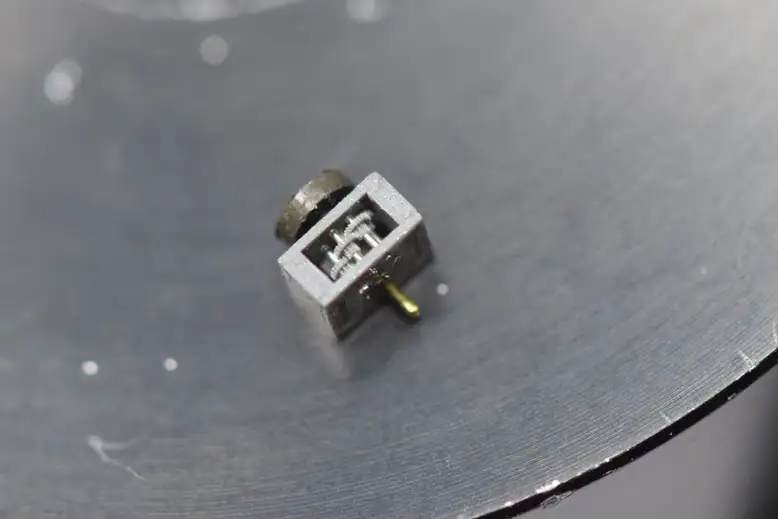
اکنون، چونگ هونگ در مؤسسه سیستمهای هوشمند ماکس پلانک در آلمان و همکارانش جعبهدندهای ساختهاند که قطر آن حدود 3 میلیمتر است و به چرخ دنده هایی به قطر 270 میکرومتر مجهز شده است.
چرخ دنده ها با رزین اپوکسی آغشته به آلومینیوم ریخته گری می شوند. آهنربای نصب شده به شفت ورودی توسط یک میدان مغناطیسی چرخشی بیرونی به گردش می آید که گشتاور یا نیروی چرخشی را تا 342 برابر تقویت می کند.
این گیربکس ها – که شامل هفت چرخ دنده برای تقویت ورودی هستند – می توانند در ربات های مدولار مختلف برای انجام طیف وسیعی از وظایف نصب شوند: یکی مانند کرم صد پا با سرعت 0.68 میلی متر در ثانیه می خزد، دیگری انرژی را در پاهای الاستیک ذخیره می کند و 119 میلی متر می پرد، برخی دیگر به اجسام صلب که با سوزن سوراخ میکنند ، میچسبند.
در آزمایش یک ربات وینچ مانند مجهز به گیربکس توانست 103 گرم وزن را بلند کند.هونگ میگوید این فناوری میتواند امکان ایجاد رباتهای نرم قدرتمندتر و پیچیدهتر را فراهم کند، اگرچه آنها به گیربکس جامد در هسته خود نیاز دارند.در آینده ممکن است از این ربات در فضاهای محدود، مانند بدن انسان، استفاده کنیم در مقایسه با دیگر رباتهای مغناطیسی، رباتهای ما فقط به یک میدان مغناطیسی بسیار کوچک نیاز دارند، بنابراین میتوانیم سیستم کنترل خود را دورتر از ربات قرار دهیم، زیرا این گیربکس نیروی مغناطیسی را برای عملکرد تقویت میکند. بنابراین شاید این ربات بتواند مسافت کاری بیشتر [از روبات های نرم موجود] طی کند.»




















