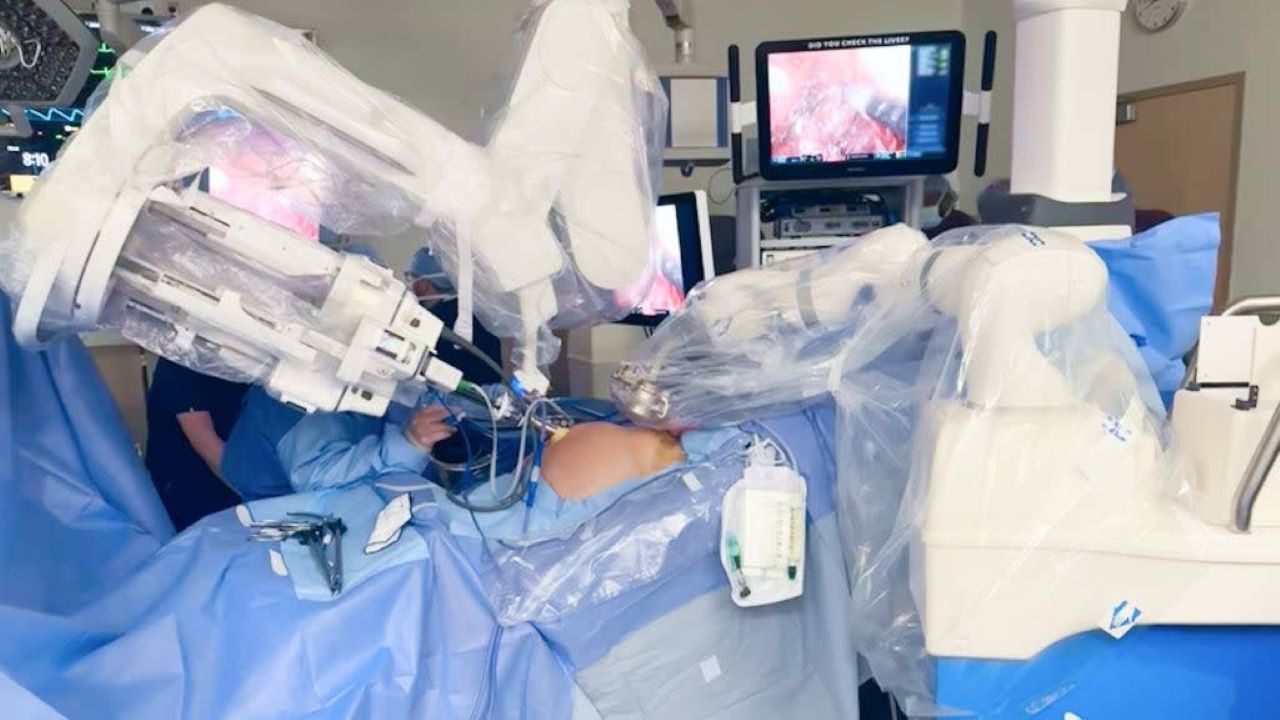
برای نخستین بار در جهان، عمل جراحی برداشتن پروستات با استفاده از دو ربات جراحی مختلف در مرکز پزشکی دانشگاه تگزاس با موفقیت انجام شد.
به گزارش تکناک، در این عمل، دو پلتفرم جراحی مختلف بهطور همزمان به کار گرفته شدند. یکی از آنها پلتفرم جراحی MARS از شرکت Levita بود، که از فناوری مغناطیسی برای جابهجایی بافتها استفاده میکند و دیگری ربات تکپورت Da Vinci SP ساخت شرکت Intuitive Surgical بود، که برای انجام جراحیهای پیچیده از یک پورت واحد استفاده میکند.
دکتر جفری کاددو، اورولوژیست و استاد دانشگاه UT Southwestern در این باره گفت: «این اولین بار است که در یک عمل جراحی رباتیک از دو سیستم مختلف بهطور همزمان استفاده میشود. این موضوع نشاندهنده انعطافپذیری پلتفرم MARS است، که با فناوری مغناطیسی خود دقت جراحی را بهبود میبخشد و دسترسی به نواحی حساس در ناحیه لگن را ممکن میسازد.»
در این عمل جراحی، پلتفرم MARS برای جابهجایی بافتهای داخلی و باز کردن فضای جراحی استفاده شد. این فناوری مغناطیسی به تیم جراحی کمک کرد تا دید بهتری از نواحی حساس بدن، از جمله اعصاب مرتبط با عملکرد جنسی و کنترل ادرار بهدست آورند، چرا که غده پروستات به طور مستقیم در مجاورت این اعصاب قرار دارد.
از سوی دیگر، ربات Da Vinci SP قابلیت تکپورت را فراهم کرد، که برای این جراحی پیچیده ضروری بود.

تیم جراحی با ترکیب این دو پلتفرم توانستند مزایای زیادی را در زمینه دقت و کارایی جراحی مشاهده کنند. ربات Da Vinci SP دسترسی دقیق تکپورت را فراهم کرد، در حالی که سیستم MARS با کاهش برشها و افزایش قابلیت جراحی، راهحل بهینهای برای نیازهای جراحی پیچیده ارائه داد.
دکتر آلبرتو رودریگز-ناوارو، مدیرعامل و بنیانگذار شرکت Levita Magnetics، در اینباره اعلام کرد: «این عمل نشان داد که پلتفرم MARS نه تنها به عنوان یک سیستم جراحی مستقل عمل میکند، بلکه میتواند به عنوان یک تقویتکننده قوی برای سیستمهای جراحی دیگر نیز به کار گرفته شود. ما با ترکیب این تکنولوژیها، استاندارد جدیدی برای جراحیها ایجاد کردهایم، که بر ایمنی بیمار، کارایی و نتایج بهتر تمرکز دارد.»
در یک گام دیگر به سوی آینده جراحی رباتیک، محققان دانشگاه استنفورد به تازگی سیستم رباتیک جراحی Da Vinci را با استفاده از تکنیکهای یادگیری تقلیدی آموزش دادهاند.
این سیستم با تجزیه و تحلیل دادههای ویدیویی از جراحیها، مهارتهای پیچیدهای مانند: استفاده از سوزن، بلند کردن بافت و بخیهزدن را به طور خودکار یاد گرفته است. این رویکرد باعث میشود که رباتها به طور خودکار وظایف جراحی را انجام و زمان آموزش را به شدت کاهش دهند.
این مدل یادگیری ماشینی، که از تکنیکهای پیشرفته یادگیری تقلیدی الهام گرفته است، به رباتها این امکان را میدهد که وظایف مختلف جراحی را در مدت زمان کوتاهتری یاد بگیرند و توانایی آنها را در جراحیهای خودکار به طرز چشمگیری افزایش میدهد. همچنین این روش میتواند اشتباهات جراحی را کاهش دهد و دقت را در طول عملها بالا ببرد.
این پیشرفتها گامهای بزرگی در راستای خودمختاری در جراحیهای رباتیک و کاهش نیاز به برنامهنویسی دقیق برای هر عمل است. این دستاوردها، علاوه بر افزایش دقت، میتواند آینده جراحیهای رباتیک را متحول و راه را برای انجام جراحیهای پیچیدهتر و دقیقتر هموار کند.



















