
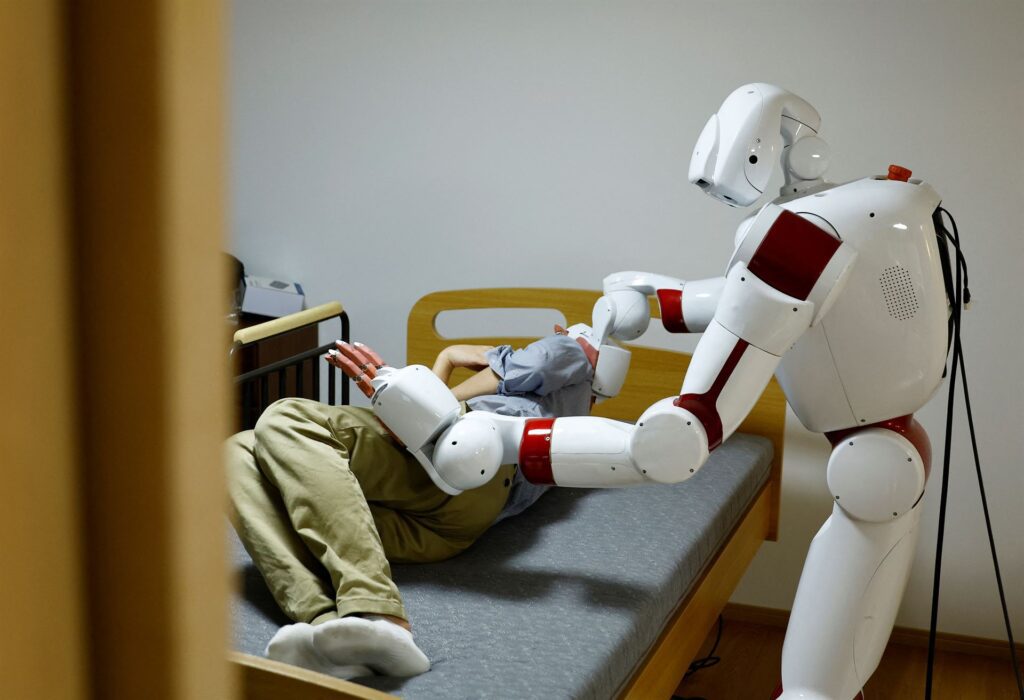
در توکیو، یک ربات انساننما به نام AIREC در حال آزمایش است تا به عنوان دستیاری برای مراقبت از جمعیت سالمند ژاپن عمل کند.
به گزارش تکناک، این ربات که ۱۴۹ کیلوگرم وزن دارد، اخیراً توانایی خود را در کمک به مراقبت از سالمندان نشان داده است، از جمله توانایی غلتاندن آرام یک مرد به پهلو که حرکتی ضروری برای تعویض پوشک یا جلوگیری از زخم بستر است. این ربات بهمنظور حل مشکل کمبود کارکنان مراقبت از سالمندان در ژاپن توسعه یافته است و بازتابی از آینده مراقبتهای رباتیک را به نمایش میگذارد.
چالشهای جمعیتی و نیاز به رباتهای مراقبتی
شگهکی سوگانو، استاد دانشگاه واسدا و مسئول پروژه AIREC، به رویترز گفت: با توجه به جامعه پیری که داریم و کاهش نرخ تولد، ما به حمایت رباتها در مراقبتهای پزشکی و سالمندان و همچنین در زندگی روزمرهمان نیاز خواهیم داشت.
این نیاز تنها به ژاپن محدود نمیشود. در ژانویه ۲۰۲۳، چین نیز برنامههایی را برای ادغام رباتهای انساننما و هوش مصنوعی در مراقبت از سالمندان پیشنهاد داد.
با افزایش جمعیت سالمندان و نرخ پایین تولد، رباتهای انساننما بهطور فزایندهای مورد توجه قرار گرفتهاند تا در نقشهای مراقبت پالیاتیو یا palliative caregiving (تسکینی) استفاده شوند. سالخوردگی جمعیت باعث کاهش تعداد پرستاران شده است و این امر نیاز به راهحلهای خودکار را برای انجام کارها بهطور مؤثر و ایمن برجسته کرده است.
محدودیتهای فناوری و چالشهای پیشرو
با وجود فوریت این مسئله، محققان دانشگاه واسدا اعلام کردهاند که ادغام رباتیک در مراقبتهای پزشکی هنوز به دلیل موانع فناوری که باید برطرف شوند، محدود است و نمیتوان آن را بهطور گسترده استفاده کرد. رباتهای مراقبتی باید حرکات خود را بهگونهای تنظیم کنند که با موقعیتهای غیرمنتظره سازگار باشند، برخلاف رباتهای صنعتی که حرکات از پیش تعیینشده دارند. از آنجا که رباتهای انساننما قادر به انجام وظایف پیچیده نیستند، از شبکههای عصبی عمیق (DNN) برای بهبود درک و برنامهریزی حرکات رباتها استفاده میشود.
حرکات تطبیقی و کنترل نیروی پیچیده
حرکات تطبیقی برای رباتهای مراقبتی ضروری است. محققان اشاره میکنند که در حالی که مطالعات قبلی نشان دادهاند شبکههای عصبی عمیق قادر به هدایت دستان ربات در انجام وظایف دقیق هستند، مراقبت از سالمندان نیاز به کنترل نیروی پیچیدهتری دارد. رباتها باید بدانند که چه زمانی و چگونه نیروی لازم را اعمال کنند تا درمانی ایمن و مؤثر ارائه دهند و از وارد کردن فشار غیرضروری به نواحی حساس خودداری کنند.
تکنولوژی مراقبتی تطبیقی
یک مطالعه در سال ۲۰۲۴ که توسط تیمی از دانشگاه واسدا انجام شده بود، ساختار مبتنی بر یادگیری عمیق را برای یک ربات انساننما پیشنهاد داد که میتواند سختی مفاصل خود را بهطور پویا تنظیم کند.
این رویکرد از تدریس مستقیم مبتنی بر کنترل نیرو (کنترل امپدانس) استفاده میکند تا به ربات اجازه دهد نیروی مناسب را اعمال کرده و از فشار بیش از حد به نواحی غیرمطلوب جلوگیری کند. علاوه بر این، ربات میتواند بهطور مستقل بین چندین حالت نیرو جابهجا شود و این کار بهوسیله سیستم توجه به وضعیتهای مفصلی انجام میشود.
پلتفرم آزمایشی و فناوریهای پیشرفته
پلتفرم آزمایشی این تحقیق، ربات انساننمای Torobo ساخت شرکت Tokyo Robotics Inc است. این ربات مجهز به حسگرهای حسی و نوری، یک سیستم کنترل پیچیده و حالت تطابق برای تنظیم سختی مفاصل است. تعلیم مستقیم به ربات با استفاده از یک دستگاه ثبت حرکت امکانپذیر است که حرکات ربات و بازوی اپراتور را همزمان میکند. در حین وظایف مراقبتی، کنترل امپدانس از اعمال نیروی مناسب اطمینان حاصل میکند و به ربات امکان میدهد تا حرکات انعطافپذیر انجام دهد.
معماری EIPL و یادگیری عمیق
این فرآیند که به نام EIPL شناخته میشود، از یادگیری عمیق برای پیشبینی رویدادهای آینده و کاهش خطاها استفاده میکند. در این روش، یک مدل به نام رمزگذار خودکار (autoencoder) تصاویر دوربین را پردازش کرده و نقاط مهم در تصویر را شناسایی میکند. سپس، شبکهای به نام SKNet به زوایای مفاصل و نیروهای وارد بر آنها توجه میکند و اهمیت ویژگیهای مختلف را تنظیم میکند. این مدل حرکات مفاصل را پیشبینی کرده و دستورات لازم را به یک کنترلکننده ارسال میکند تا حرکات دقیق و تطبیقی انجام شود.
آینده ربات AIREC
این تحقیق هنوز در مرحله آزمایش است و تیم پیشبینی میکند که ربات AIREC برای استفاده در مراکز مراقبت از سالمندان یا بیمارستانها تا سال ۲۰۳۰ آماده نخواهد شد. انتظار میرود که قیمت اولیه این ربات حداقل ۱۰ میلیون ین (۶۷,۰۰۰ دلار) باشد.
ربات AIREC نمادی از آینده مراقبتهای رباتیک است که میتواند به حل چالشهای ناشی از پیری جمعیت و کمبود نیروی کار در بخش مراقبت از سالمندان کمک کند. با وجود چالشهای فناوری، پیشرفتهای اخیر در یادگیری عمیق و کنترل تطبیقی نشان میدهد که رباتهای انساننما میتوانند نقش مهمی در بهبود کیفیت زندگی سالمندان ایفا کنند. این فناوری نهتنها به کاهش فشار بر سیستمهای مراقبت بهداشتی کمک میکند، بلکه امیدوار است که مراقبتهای شخصیتر و مؤثرتری را برای سالمندان فراهم کند.




















