فهرست مطالب
محققان الگوریتم نوینی را توسعه دادهاند که امکان همکاری چند پهپاد برای کنترل و حمل بارهای سنگین را فراهم میکند.
به گزارش تکناک، این الگوریتم که توسط دانشمندان دانشگاه TU Delft طراحی شده، به پهپادها اجازه میدهد وظایف پیچیده در زیرساختهای سختدسترس، مانند توربینهای بادی دریایی، را بهطور موثر انجام دهند.
با توجه به شرایط جوی نامساعد، ظرفیت محدود بار و تماسهای غیرقابل پیشبینی با محیط، پهپادهای کنونی بهسختی میتوانند بهصورت ایمن و کارآمد عمل کنند.
01
از 01یک پهپاد بهتنهایی بار محدودی حمل میکند
بهگفته سیهاو سان، پژوهشگر رباتیک در دانشگاه TU Delft: «یک پهپاد بهتنهایی تنها قادر به حمل بار بسیار محدودی است. این محدودیت، استفاده از پهپادها برای وظایفی مانند انتقال مصالح ساختمانی سنگین به مناطق دورافتاده، حمل حجم بالای محصولات کشاورزی در مناطق کوهستانی یا کمک در ماموریتهای نجات را دشوار میسازد.» تیم TU Delft اعلام کرده است که با سیستم جدید خود توانستهاند این محدودیتها را برطرف کنند.
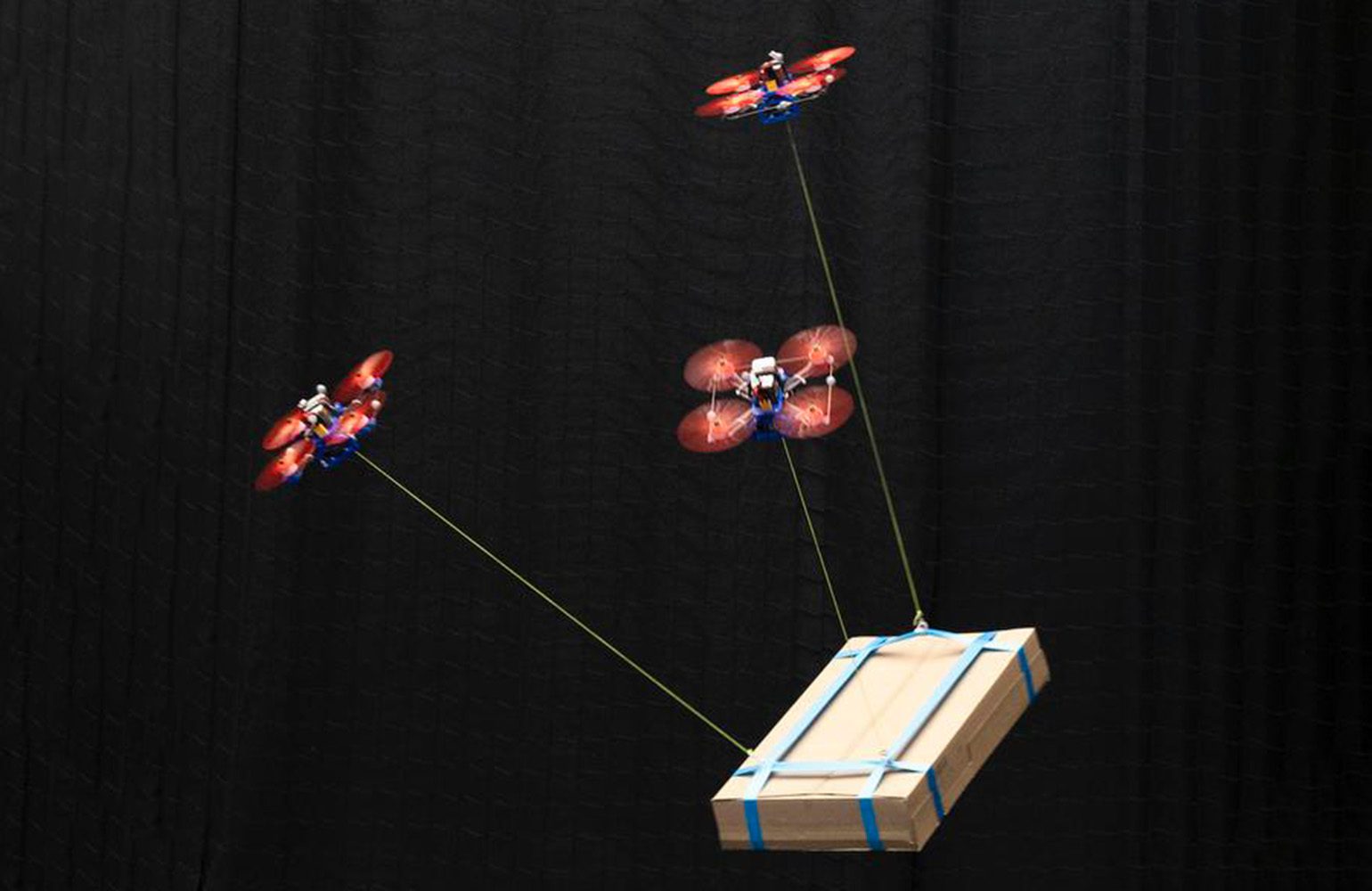
در این سیستم، چند پهپاد از طریق کابل به بار متصل میشوند و قادرند بارهای بسیار سنگینتر را جابهجا کنند. با تنظیم موقعیتها بهصورت لحظهای، پهپادها نهتنها قادر به بلند کردن و حمل بار هستند، بلکه میتوانند جهت آن را نیز کنترل کنند؛ قابلیتی حیاتی برای جایگذاری دقیق در محیطهای پیچیده.
سان میگوید: «هنگامی که پهپادها بهصورت فیزیکی به هم متصل میشوند، باید به یکدیگر و همچنین به اختلالات خارجی مانند حرکات ناگهانی بار پاسخ دهند. الگوریتمهای کنترل سنتی برای این منظور بسیار کند و محدود عمل میکنند.»
الگوریتم جدید پهپادها را با بارهای متغیر وفق میدهد
تیم پژوهشی اعلام کرده است که الگوریتم جدیدشان سریع، منعطف و مقاوم است. این الگوریتم قادر است با تغییر بارها سازگار شود و نیروهای خارجی را بدون نیاز به نصب حسگر روی بار جبران کند که مزیتی مهم در کاربردهای واقعی محسوب میشود. آنها همچنین خاطرنشان کردند که الگوریتمهای کنترل فعلی برای سیستمهای چندپهپادی تنها امکان عملیات با سرعت و شتاب پایین را فراهم میکنند.
مطالعه منتشرشده در Science Robotics، راهحلی برای افزایش چشمگیر چابکی سیستمهای چندپهپادی معلق با کابل ارائه میدهد. برخلاف راهکارهای سنتی، این الگوریتم مبتنی بر مسیر حرکت، برنامهریزی حرکتی کل بدن را بهصورت آنلاین حل میکند و اثرات دینامیکی و محدودیتهای متقابل بین پهپادها و بار را لحاظ میکند.
پژوهشگران در این مطالعه اظهار کردند: «مسیر برنامهریزیشده بهصورت مرجع به پهپادها داده میشود و توسط کنترلکنندهای داخلی که تنش کابل را پایش و جبران میکند دنبال میشود. آزمایشهای میدانی نشان داد چارچوب ما میتواند حداقل هشت برابر شتاب بیشتری نسبت به روشهای پیشرفته برای دنبال کردن مسیرهای چابک ارائه دهد»،
در حال حاضر، سیستم برای آزمایشهای داخلی به دوربینهای حرکتنگار خارجی وابسته است و هنوز برای محیطهای بیرونی قابل استفاده نیست. تیم پژوهشی امیدوار است در آینده این فناوری را برای کاربردهای واقعی آماده کند، از جمله در عملیات جستوجو و نجات، کشاورزی و ساختوساز در مناطق دورافتاده.
آنها همچنین تاکید کردند که سیستم تمامی آزمایشها را با موفقیت پشت سر گذاشته است. با توجه به خودران بودن پهپادها، تنها کافی است مقصد به آنها داده شود و آنها مسیر خود را بهصورت مستقل، با در نظر گرفتن موانع و اختلالات، طی میکنند. سان توضیح داد: «ما پهپادهای خود را ساختیم و آنها را در محیط آزمایشگاهی کنترلشده تست کردیم. همزمان از چهار پهپاد استفاده کردیم، موانع اضافه کردیم، باد را با پنکه شبیهسازی کردیم و حتی از یک بار متحرک مانند توپ بسکتبال برای آزمایش پاسخهای دینامیکی بهره بردیم»