
فهرست مطالب
دانشمندان چینی با استفاده از توانایی داینامیک بازوی انسان رباتهایی ساختهاند که میتوانند میرایی خود را برای انجام کارهای مختلف با دقت و ثبات فراوان تنظیم کنند.
بهگزارش تکناک، گروهی از محققان مؤسسهی فناوری پکن روش جدیدی برای کنترل ربات (robot : mechanical or virtual artificial agent carrying out physical activities, which can be guided by an external control device or the control may be embedded within) هایی ابداع کردهاند که میتوانند ماهوارهها را در فضا جمعآوری کنند. در این شیوه، از بازوی انسان الهام گرفته شده است که میتواند میرایی رباتها را برای انجام کارهای مختلف با دقت و ثبات زیاد تنظیم کند. محققان یافتههای خود را در مجلهی Cyborg و Bionic Systems منتشر کردند.
01
از 01عملیات فضایی با رباتها و مشکلات مرتبط به آنها
عملیات فضایی نیازمند رباتها برای تعامل با اشیاء در محیطهای پیچیده و پویاست. بااینحال، روشهای سنتی کنترل ربات محدودیتهایی در انطباق با موقعیتهای متنوع و نامطمئن دارند و مستعد ارتعاش هستند که میتواند باعث خرابی مونتاژ شود. برای غلبه بر این مشکلات، محققان روش کنترل پذیرش متغیر و شبیه انسان را براساس ویژگیهای میرایی متغیر توانایی داینامیک بازوی انسان پیشنهاد کردند.
میرایی بهمعنای فرایند کاهش دامنهی نوسانها یا ارتعاشها با اتلاف انرژی است و برای جلوگیری از آسیبرساندن نیروی تماس بیشازحد به اجسام در هنگام مونتاژ ضروری است. بازوی انسان میتواند بهطور انعطافپذیر میرایی خود را تنظیم کند تا وظایف مختلف را بهطور ایمن و پایدار انجام دهد. بهعنوان مثال، هنگام نگهداشتن شیئی شکننده، بازوی انسان برای جلوگیری از شکستن آن، میراییاش را کاهش میدهد؛ درحالیکه هنگام هُلدادن جسمی سنگین، میرایی آن را برای اِعمال نیروی بیشتر افزایش میدهد.
محققان توانایی داینامیک بازوی انسان را با طراحی کنترلکنندهی ورودی متغیر برای رباتها تقلید کردند که میتواند میرایی آنها را باتوجهبه شرایط تماس و الزامات مونتاژ تغییر دهد و اختلالات خارجی و نبود قطعیتهای محیطی را جبران کند.
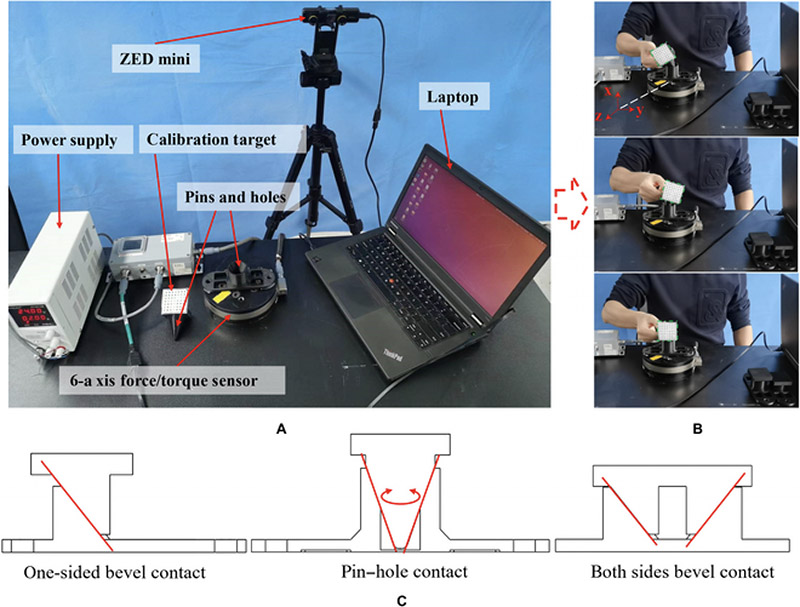
محققان برای آزمایش روش خود، پلتفرم جمعآوری دادهی پویایی ساختند تا توانایی داینامیک بازوی انسان را حین کار مونتاژ ثبت کند. آنان از حسگر نیروی ATI omega160 ششبعدی برای اندازهگیری نیروی تماس بین دست انسان و قطعات مونتاژ و سیستم ضبط حرکت مینی Stereolabs ZED برای بهدستآوردن سرعت انتهایی بازوی انسان استفاده کردند.
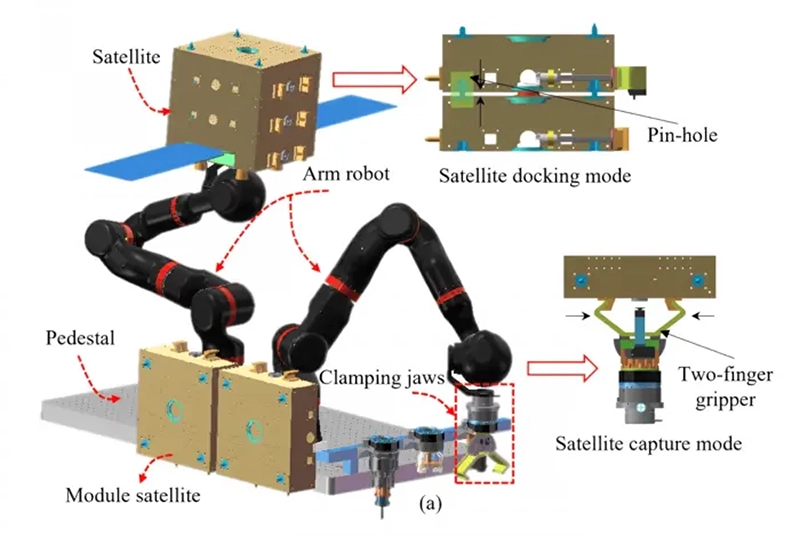
درادامه، محققان دادهها را تجزیهوتحلیل و ویژگیهای داینامیکی اجزای انسانی و سه الگوی تماس برای مونتاژ ماهواره را خلاصه کردند: تماس کشویی و تماس ضربهای و تماس پایدار. سپس، محققان روش خود را برای دستکاری رباتی بهکار بردند که میتوانست اجزای ماهواره را در فضا جمعآوری کند. آنان شبیهسازیها و آزمایشهایی را برای ارزیابی عملکرد روش خود در سناریوهای مختلف انجام دادند و آن را با سایر روشهای کنترل انطباق مقایسه کردند. محققان متوجه شدند که رویکردشان میتواند ایمنی و استحکام و سازگاری مونتاژ فضای ربات را بیشتر بهبود ببخشد.
افزونبراین، محققان روش خود را ازطریق سکوی آزمایشی زمینی تأیید کردند که مونتاژ ماهوارههای فضایی را شبیهسازی میکرد. پلتفرم رباتیک آنان میتوانست نیروها و گشتاورها را در انتهای بازوی رباتیک در جهتهای X و Y و Z اندازهگیری کند. آنان کنترلکنندهی پذیرش پارامتر متغیر شبیه انسان را در آزمایش مونتاژ ماهواره ربات اعمال و با موفقیت کارایی روش خود را تأیید کردند.
توسعهی استراتژیهای کنترلی که رفتارهای شبهانسانی را تقلید میکنند، سازگاری و دقت و کنترلپذیری ربات هایی را میتواند بسیار افزایش دهد که وظایف مونتاژ و نگهداری را در فضا انجام میدهند. باوجوداین، لازم است تحقیقات بیشتری در این زمینه انجام شود. علاوهبراین، به ربات های بادوام و مطمئنی احتیاج است که بتوانند در محیطهای سخت فضایی مقاومت کنند.




















