جهت یابی ربات ها در مکان های شلوغ در زمینه های مختلفی از جمله ربات های خدماتی مراکز خرید، حمل و نقل، بهداشت و درمان و غیره کاربرد دارد.
به گزارش تکناک، برای تسهیل حرکت سریع و کارآمد، توسعه روشهای جدید بسیار مهم است تا رباتها بتوانند با خیال راحت در فضاهای شلوغ و موانع حرکت کنند.
دانشگاه فنلاند شرقی الگوریتمهای خلاقانهای را توسعه داده است که میتواند مسیریابی هوشمند و کارآمد رباتها را در میان جمعیت فعال کند.
طبق بیانیه رسمی، محقق، چنگمین ژو، الگوریتم های یادگیری تقویتی (RL) را برای جهت یابی ربات های خدماتی در پایان نامه خود ارائه کرد.
نیاز به الگوریتم های پیشرفته
این Robot (mechanical or virtual artificial agent carrying out physical activities, which can be guided by an external control device or the control may be embedded within) به طور معمول محیط اطراف خود را با استفاده از ترکیبی از سیستم های نرم افزاری مجهز مختلف، از جمله دوربین های با تکنولوژی بالا و سایر حسگرها ارزیابی می کند.
این استراتژی ربات را قادر می سازد تا به سرعت در مسیری نسبتاً مستقیم و بدون مانع حرکت کند، به خصوص در مناطق خلوت.با این حال، در میان جمعیت، حرکت ربات ها با جابجایی های ناگهانی و تغییرات مکرر جهت مشخص می شود که اغلب شامل چندین مکث می شود.
در نسخه رسمی ذکر شده است: روش های فعلی به منابع محاسباتی بیش از حد نیاز دارند بنابراین برای کاربردهای بلادرنگ که واکنش ها باید سریع باشند، مناسب نیستند.
برای مقابله با این چالش، الگوریتم های پیشرفته ممکن است در سیستم محاسباتی داخلی ربات ادغام شوند.
این الگوریتمها میتوانند با چالشهای جهت یابی در سناریوهایی با موانع متحرک متعدد، بهویژه در محیطهای شلوغ که ربات باید به دلیل محدودیتهای زمانی به سرعت پاسخ دهد، مقابله کند.
پیاده سازی سه جنبه فنی ربات
برای انجام این کار، الگوریتم های یادگیری تقویتی بدون مدل (RL) بهترین گزینه برای حرکت سریع ربات است. ربات ها می توانند از تجربیات خود بیاموزند و به لطف RL با تنظیمات جدید سازگار شوند.
انتشار رسمی پیاده سازی سه جنبه فنی برای بهبود جهت یابی رباتیک را توصیف می کند. اقدامات گسسته شامل محدود کردن گزینه های قابل دسترسی برای ربات ها در هنگام انتخاب مرحله بعدی است.
ادغام دادههای بلادرنگ و گذشته
این مرحله شامل ادغام دادههای بلادرنگ جمعآوریشده در طول عملیات ربات با دادههای گذشته است. این ادغام به ربات ها کمک می کند تا بر اساس تجربیات مختلف یاد بگیرند و سازگار شوند.
بهره برداری از داده های رابطه ای
ربات ها در آموزش خود از اطلاعات مربوط به روابط خود با موانع استفاده می کنند.
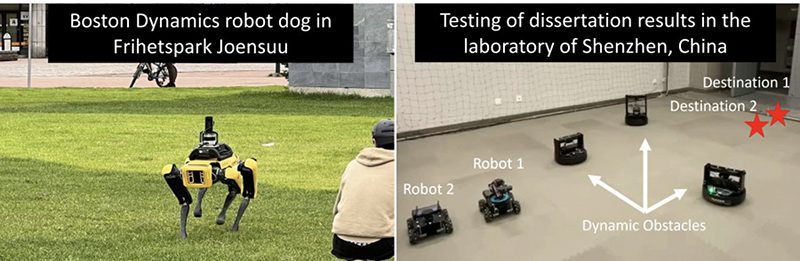
الگوریتم های نوآورانه این تیم به دقت در شبیه سازی های کامپیوتری و یک محیط آزمایشگاهی کنترل شده در دانشگاه فناوری شنژن چین مورد ارزیابی قرار گرفته اند تا کارایی و قابلیت اطمینان آنها را آزمایش کنند.
سگ های رباتیک به عنوان دارایی های قابل توجه با استفاده های آینده نگر در صنایع مختلف، از جمله عملیات نظامی، خدمات تحویل بسته، و تلاش های جستجو و نجات در نظر گرفته می شوند.
اگر این الگوریتم جدید توسعه یافته موفقیت آمیز باشد، این پتانسیل را دارد که در پیشرفت ربات های انعطاف پذیر نسل بعدی، تاثیر گذار باشد.
این رشته مطالعاتی به سرعت در حال پیشرفت است تا سگهای رباتیک مهارت بیشتری داشته باشند.
در ماه آگوست، مهندسان یک ربات چهارپا را با الهام از سگ ها معرفی کردند که توانایی دویدن مستقل بدون پشتیبانی خارجی یا استفاده از موتورهای کنترلی برای حفظ گام خود را نشان می دهد.