یکی از رایجترین کاربردهای پیشنهادی برای رباتهای کوچک، جستجوی بازماندگان به دام افتاده در آوارهای محل فاجعه است.
به گزارش تکناک، ربات CLARI الهام گرفته از حشرات در انجام این کار بسیار خوب است، زیرا میتواند خود را باریکتر کند تا از شکافهای افقی فشرده عبور کند.
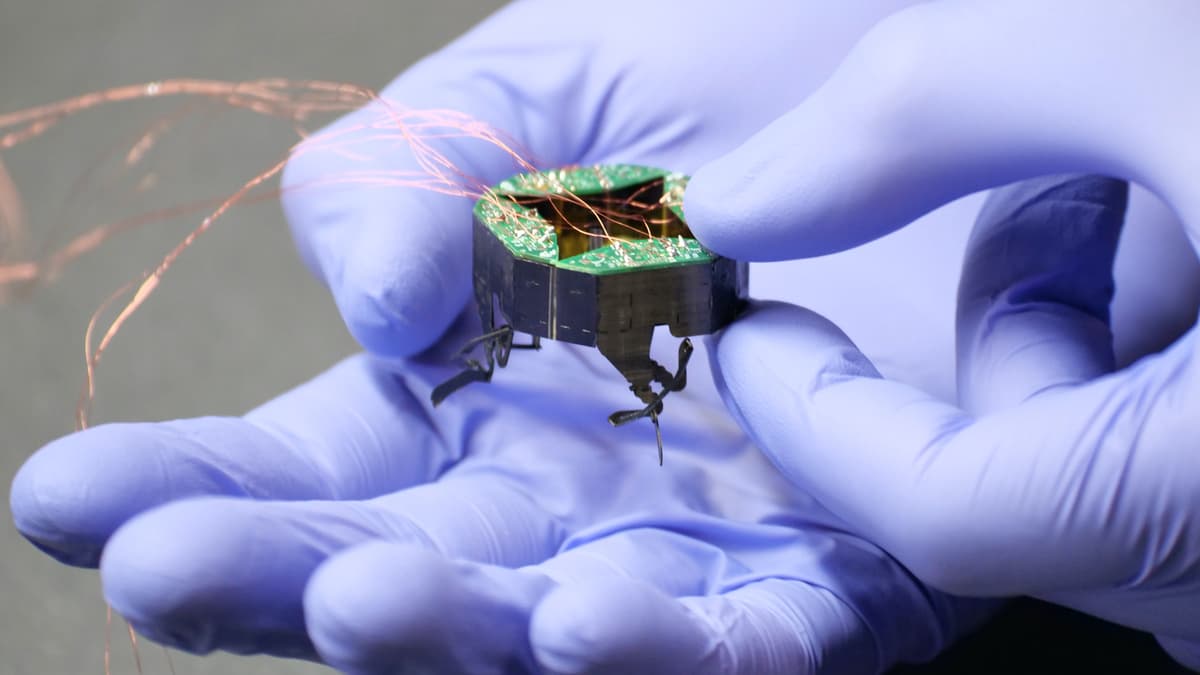
نام کامل آن “Compliant Legged Articulated Robotic Insect” است (CLARI) در دانشگاه کلرادو توسط تیمی به رهبری دانشجوی دکترای مهندسی هایکو کابوتز ساخته شده است. هایکو با معاون دانشگاه پروفسور کاوشیک جایارام همکاری داشت که قبلا یک روبات الهام گرفته از سوسک ایجاد کرده بود که خود را تخت می کند تا از شکاف های عمودی عبور کند.
تقریباً به اندازه یک تکه رول سوشی، بدن چهارپای CLARI از بالا مربع شکل است و از چهار بخش تشکیل شده است که توسط پوسته بیرونی انعطاف پذیر ربات به یکدیگر متصل شده اند.
هر بخش دارای یک پا به همراه مدار خود و محرک های دوگانه است که پا را به جلو و عقب و چپ و راست حرکت می دهد. این بدان معنی است که هر پا می تواند مستقل از سایرین عمل کند.
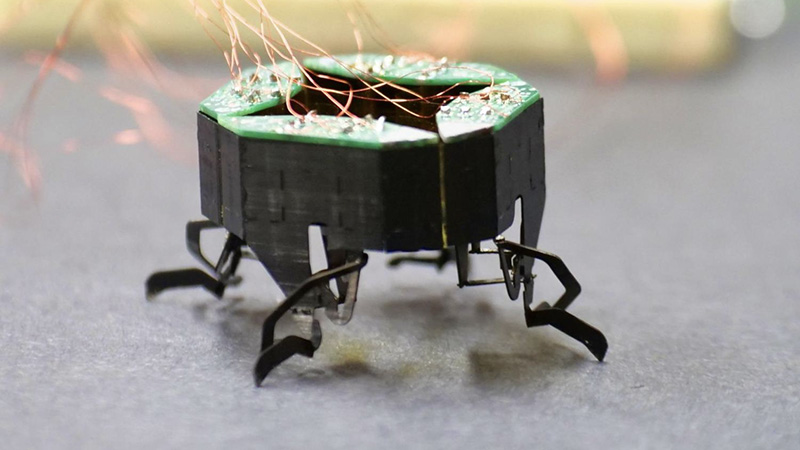
هنگام حرکت در زمین باز، CLARI به شکل مربع پیش فرض خود برای سرعت و ثبات بهینه باقی می ماند. با این حال، اگر با شکافی روبرو شود که برای عبور از آن به آن شکل خیلی باریک نیاز است، میتواند خود را به شکل بلندتر و باریکتری دوباره پیکربندی کند. عرض ربات در حالت مربع حدود 34 میلی متر (1.3 اینچ) و در حالت باریک فقط 21 میلی متر (0.8 اینچ) است.
در حالی که نسخه فعلی CLARI به منبع تغذیه و کنترل متصل شده است، امید است که نسخه های بعدی آن با باتری تغذیه شده و مجهز به حسگرهایی باشند که به آنها اجازه میدهد به طور مستقل در محیطهای پیچیده مسیر خود را طی کنند.
دانشمندان همچنین میخواهند این رباتها را کوچکتر کنند و آنها را با پاهای بیشتری برای مانورپذیری بیشتر تجهیز کنند.
کابوتز میگوید: وقتی میخواهیم حشرهای را بگیریم، ممکن است در یک شکاف ناپدید شوند. اما اگر رباتهایی با قابلیتهای یک عنکبوت یا مگس داشته باشیم، میتوانیم دوربینها یا حسگرها را اضافه کنیم و اکنون میتوانیم وارد فضاهایی شویم که قبلاً نمیتوانستیم.



















