دانشمندان در حال مطالعه بر روی حشرات واقعی هستند تا درک بهتری داشته باشند که آنها نیرو را چطور در اندام های خود حس می کنند.
به گزارش تکناک، پس از این آزمایشات، دانشمندان می توانند ربات هایی با پاهای درشت و چابک تر تولید کنند.
متخصصان در حال تحقیق بر روی نوعی از گیرنده های مکانیکی با نام campaniform sensilla (CS) هستند که در اندامهای حشرات یافت میشوند و به استرس و فشار پاسخ میدهند و میتوانند دادههای مهمی در مورد کنترل حرکت تولید کنند.
دکتر شچینسکی استادیار گروه مهندسی مکانیک و هوافضا در کالج مهندسی و منابع معدنی استاتلر در دانشگاه ویرجینیای غربی، ایالات متحدهر آمریکا، گفت: من نقش حسگرهای نیرو را در حشرات در حال راه رفتن مطالعه میکنم زیرا این حسگرها برای حرکت موفقیتآمیز حیاتی هستند.
بازخوردی که آنها ارائه می کنند برای وضعیت بدنی و هماهنگی مناسب بسیار مهم است. محققان ساخت مدلهای رباتیک را به جای مدلهای کامپیوتری انتخاب کردند، زیرا آنها طرحهای واقعیتری از اصطکاک بین قطعات متحرک، از جمله تأخیر در ارسال سیگنالهای عصبی ارائه میدهند. اندام های رباتیک حتی بهتر از مدل های حیوانی هستند زیرا می توانند ارسال و دریافت هر سیگنال و اعمال مکانیکی حاصل را ثبت کنند.
شچینسکی می گوید: راه رفتن یک کار ذاتاً مکانیکی است، بنابراین درک کنترل عصبی راه رفتن مستلزم بررسی همزمان مکانیک و کنترل عصبی است.
رباتهای راه رونده که به درستی کار میکنند میتوانند بهعنوان نمونههای اولیه برای ماشینهایی عمل کنند که میتوانند به مردم در کشاورزی در زمینهای ناهموار، کشف سیارات دیگر یا حرکت در جنگلها برای نظارت بر سلامت جنگل کمک کنند.
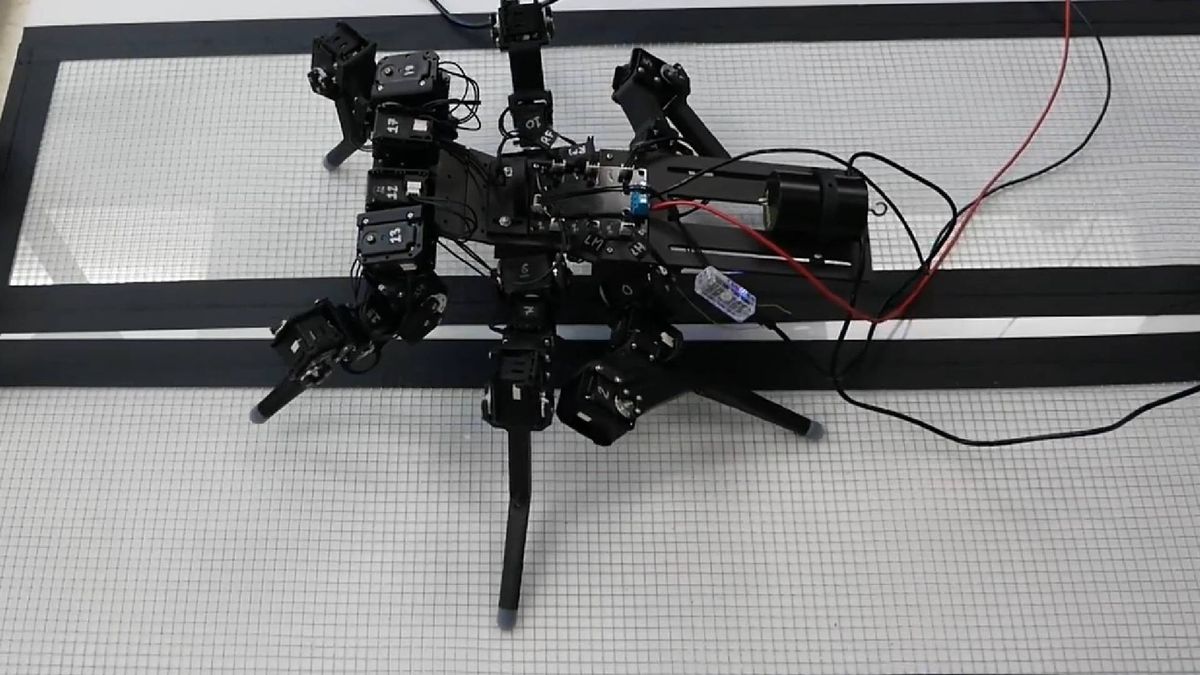
شچینسکی بر دو ربات اصلی تحقیقاتی متکی است: یک ربات زیست تقلیدی مبتنی بر مگس میوه که روی شش پا راه میرود و یک ربات تک پا که امکان شبیهسازی سادهای از تجربه حسی یک پای حشره را در حین راه رفتن فراهم میکند.
شچینسکی همچنین حشرات واقعی را مطالعه می کند و نقش CS را با ایزوله اندام های آنها و پایش مسیرهای حسی با الکترودها در هنگام اعمال نیروهای مختلف بررسی می کند. سپس سیگنالهای حسی ثبتشده برای توسعه مدلهایی برای پاهای رباتیک استفاده میشوند.
شچینسکی میگوید: با ثبت پاسخ آنها به سیگنالهای مختلف، میتوانیم تصویر واضحتری از نحوه تبدیل نیروها به فعالیت عصبی ارائه کنیم. ما از محرک های مختلفی استفاده می کنیم زیرا CS بسیار پویا است و همیشه با نیروهای اعمال شده سازگار است.
این محقق از طریق کار خود دریافت که حشرات واقعی و همتایان روباتیک آنها مشابه هستند. شچینسکی در بیانیه ای گفت: ما متوجه شدیم که برای هر گونه حشره ای که بررسی می کنیم، مدل ما به خوبی مجهز است تا بتواند توصیف کند چگونه CS نیروها را به فعالیت عصبی تبیل میکند. این نشان میدهد که اندامهای هر گونه به طور گسترده به یک شکل عمل میکنند.