فهرست مطالب
هوش مصنوعی برای نخستین بار در ایستگاه فضایی بینالمللی کنترل یک ربات را بر عهده گرفت و مسیریابی آن را تا ۶۰ درصد سریعتر کرد.
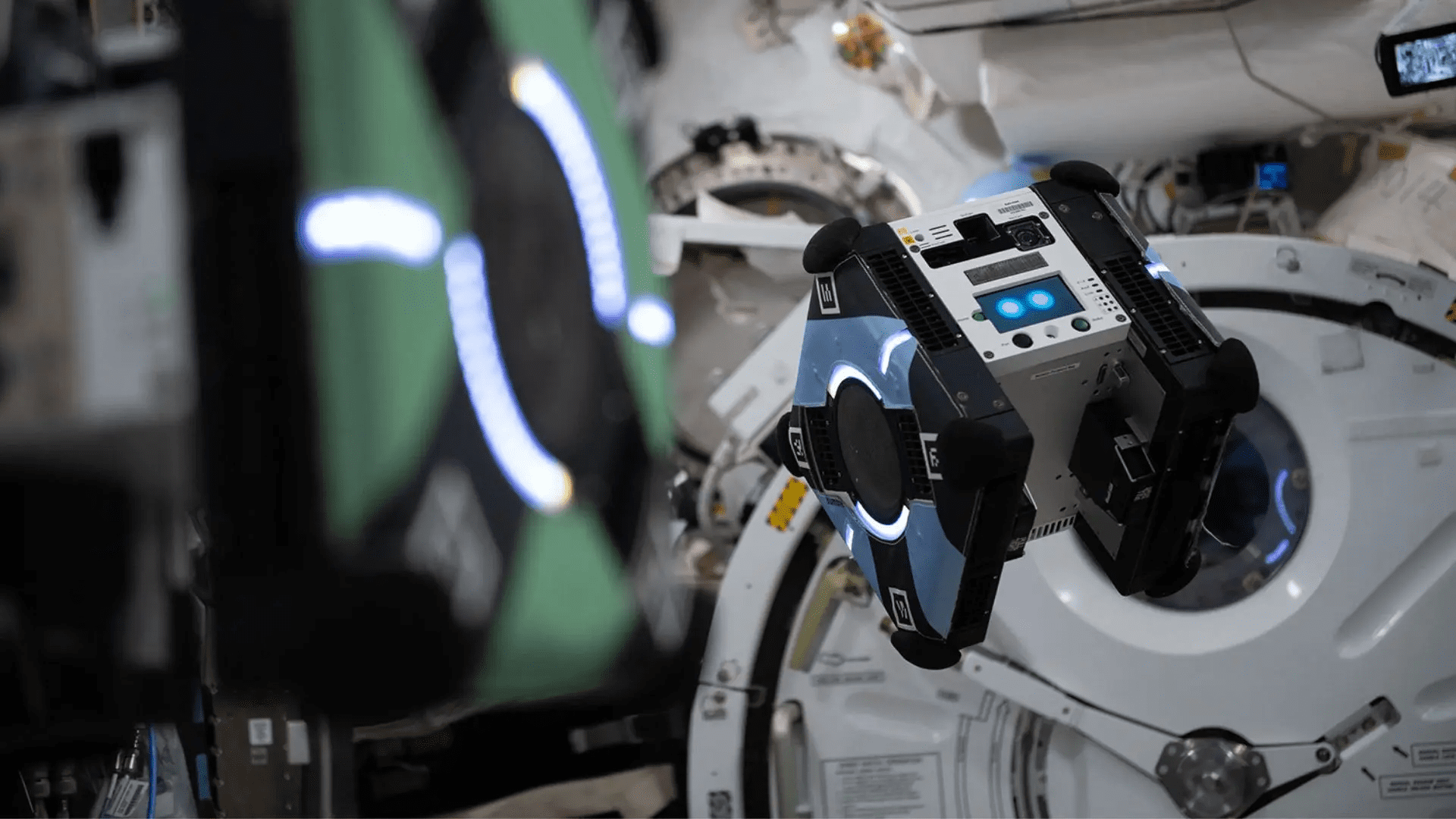
به گزارش سرویس فناوری تکناک، یک ربات کوچک هماندازه یک توستر، گامی مهم در مسیر ناوبری خودکار در فضا برداشت. پژوهشگران دانشگاه استنفورد برای نخستینبار یک سامانه کنترلی را روی ایستگاه فضایی بینالمللی آزمایش کردند؛ دستاوردی که نقطه عطفی برای رباتیک فضایی و مقدمهای بر ماموریتهایی با نقش حداقلی انسان محسوب میشود.
ربات مکعبی Astrobee که پیشتر در ایستگاه فعالیت میکرد، بهعنوان بستر آزمایش انتخاب شد. این سامانه جدید امکان حرکت ایمن ربات در راهروهای تنگ و محیطهای پرتراکم ایستگاه را بدون دخالت مستقیم فضانوردان فراهم میکند. جزئیات این پژوهش در کنفرانس بینالمللی رباتیک فضایی (iSpaRo) منتشر و ارائه شد.
برای مطالعه بیشتر: تداوم همکاری ناسا و روسیه با پرتاب مشترک به ایستگاه فضایی بینالمللی
01
از 02چرا کنترل ربات در فضا دشوار است؟
محیط ایستگاه فضایی بینالمللی به دلیل تراکم تجهیزات، سیمکشی و سازههای متعدد، یکی از دشوارترین فضاها برای برنامهریزی حرکتی محسوب میشود. سمریتا بانرجی، پژوهشگر اصلی پروژه، این پیچیدگی را عامل اصلی ناکافی بودن روشهای کلاسیک دانست؛ روشهایی که برای سختافزارهای زمینی طراحی شدهاند و در شرایط فضایی کارایی لازم را ندارند. مارکو پاوونه نیز تاکید کرد که محدودیت منابع پردازشی، چالشهای بیشتری نسبت به رباتیک زمینی ایجاد میکند.
حتما بخوانید: شرکت AgiBot از پلتفرم جدید خود برای کنترل حرکات ربات انساننما رونمایی کرد + ویدیو

بیشتر بخوانید: آیا امکان پرتاب هواپیمای کاغذی از ایستگاه فضایی بینالمللی وجود دارد؟
برای مقابله با این مشکلات، تیم تحقیقاتی یک سیستم بهینهسازی شده را طراحی کرد، اما حل هر مرحله از صفر زمان زیادی میبرد. به همین دلیل، مدل یادگیری ماشینی را بر اساس هزاران مسیر قبلی آموزش دادند تا بهعنوان نقطه شروع هوشمند عمل کند و سپس مرحله بهینهسازی مسیر را کامل کند.
این رویکرد بدون کاهش سطح ایمنی، سرعت محاسبه را بهطور چشمگیری افزایش میدهد. بانرجی این فرایند را مشابه انتخاب مسیر بر اساس تجربه و سپس بهینهسازی آن دانست. پیش از استقرار در ایستگاه، سیستم در مرکز تحقیقاتی ناسا آزمایش شد و پس از آن، فضانوردان تنها مراحل آمادهسازی را انجام دادند و کنترل اصلی از زمین صورت گرفت.
02
از 02سرنوشت ماموریتهای آینده
در مجموع ۱۸ مسیر آزمایش شد که هرکدام دو بار اجرا شدند؛ یکبار با روش استاندارد و بار دیگر با روش مبتنی بر هوش مصنوعی. نتیجه روشن بود: سرعت اجرای مسیرها (بهویژه در محیطهای تنگ و مانورهای نیازمند چرخشهای پیچیده) بین ۵۰ تا ۶۰ درصد افزایش یافت.
ناسا سامانه مذکور را در سطح فناوری ۵ طبقهبندی کرده است؛ سطحی که نشان میدهد سیستم در محیطی عملیاتی و واقعی عملکرد قابل اتکایی داشته و بدین ترتیب ریسک طرحهای پژوهشی و آزمایشی آینده را کاهش میدهد.
سمریتا بانرجی تاکید میکند که با دورتر شدن ماموریتها از زمین و افزایش تعداد آنها، اتکای بیشتر به رباتهای خودمختار اجتنابناپذیر است، چرا که کنترل مستقیم از سطح زمین همیشه امکانپذیر نخواهد بود. مارکو پاوونه و همکارانش نیز قصد دارند این فناوری را با بهرهگیری از مدلهای هوش مصنوعی قدرتمندتر، همراستا با سیستمهای پیشرفته پردازش زبان و خودروهای خودران، توسعه داده و دامنه قابلیتهای آن را گسترش دهند.