فهرست مطالب
ابزارهای رباتیک پیشرفته، آینده جراحیهای مغزی را متحول میکنند و مزایای قابل توجهی نسبت به روشهای جراحی سنتی ارائه میدهند.
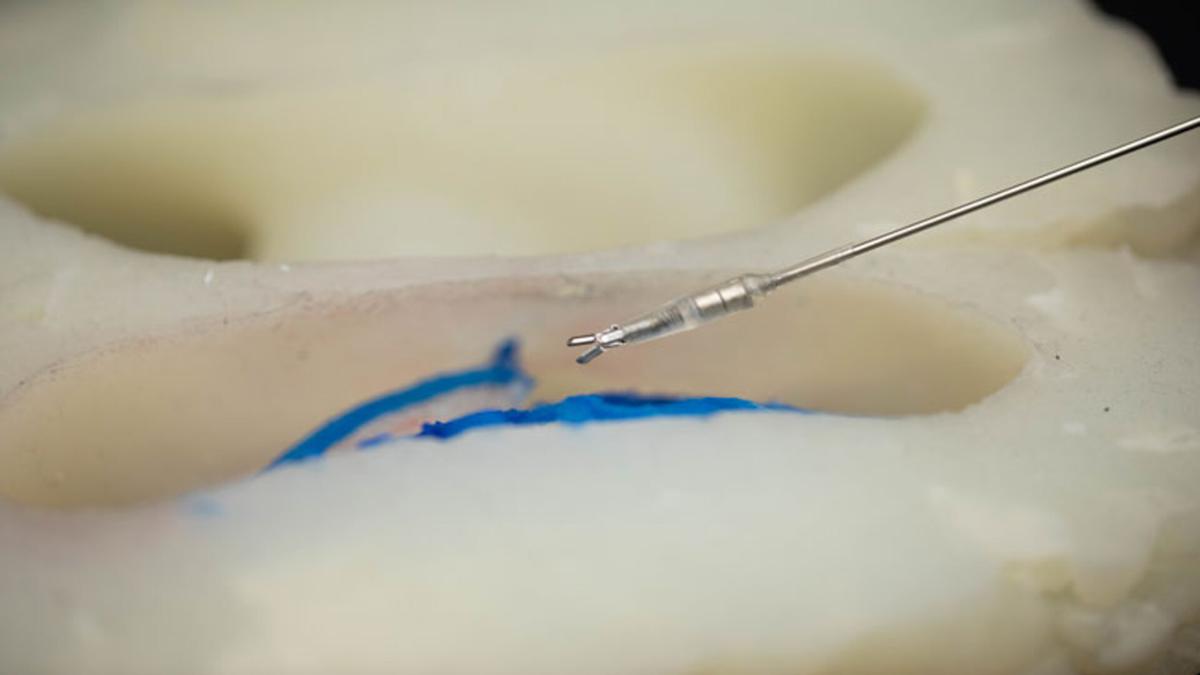
به گزارش تکناک، از جمله مزایای ابزارهای رباتیک پیشرفته میتوان به کاهش درد، کوتاهتر شدن زمان بهبودی و به حداقل رساندن آثار زخم اشاره کرد. این ابزارها با قطر تنها ۳ میلیمتر قادر به گرفتن، کشیدن و برش بافت هستند و به این دلیل اندازه کوچکی دارند که نیروی محرکه آنها به جای موتور، توسط میدانهای مغناطیسی خارجی تأمین میشود.
اریک دیلر، استاد مهندسی مکانیک دانشگاه تورنتو و یکی از پژوهشگران این تحقیق گفت: «در دو دهه گذشته، ما شاهد رشد چشمگیر ابزارهای رباتیک برای جراحیهای کمتهاجمی بودهایم، که میتواند زمان بهبودی و نتایج بیماران را بهبود بخشد.»
01
از 02نحوه عملکرد ابزارهای رباتیک
دیلر توضیح داد که ابزارهای جراحی رباتیک فعلی حرکت انگشتان را شبیهسازی میکنند و از سیستمهای کششی مشابه تاندونها برای حرکت استفاده مینمایند. اما این روش در مقیاسهای کوچکتر دچار مشکلاتی میشود.
وی بیان کرد که هرچه ابزارهای جراحی رباتیک کوچکتر شوند باید برای حرکت کابلها، فشار بیشتری وارد گردد. این کار باعث افزایش اصطکاک میشود و در نتیجه، عملکرد ابزارها را دچار مشکل میکند و قابلیت اطمینان آنها را کاهش میدهد.
در این ابزارهای جدید، به جای کابلها و قرقرهها، از مواد مغناطیسی خاصی استفاده شده است. این مواد به جراحان امکان میدهند که ابزارها را با میدانهای الکترومغناطیسی خارجی کنترل کنند. این سیستم از دو قسمت تشکیل شده است: مجموعهای از ابزارهای کوچک مانند گیره، چاقو و فورسپس و یک میز مخصوص که با سیمپیچهای الکترومغناطیسی حرکت ابزارها را هدایت میکند.
02
از 02آزمایش ابزارهای رباتیک در جراحیهای مغزی
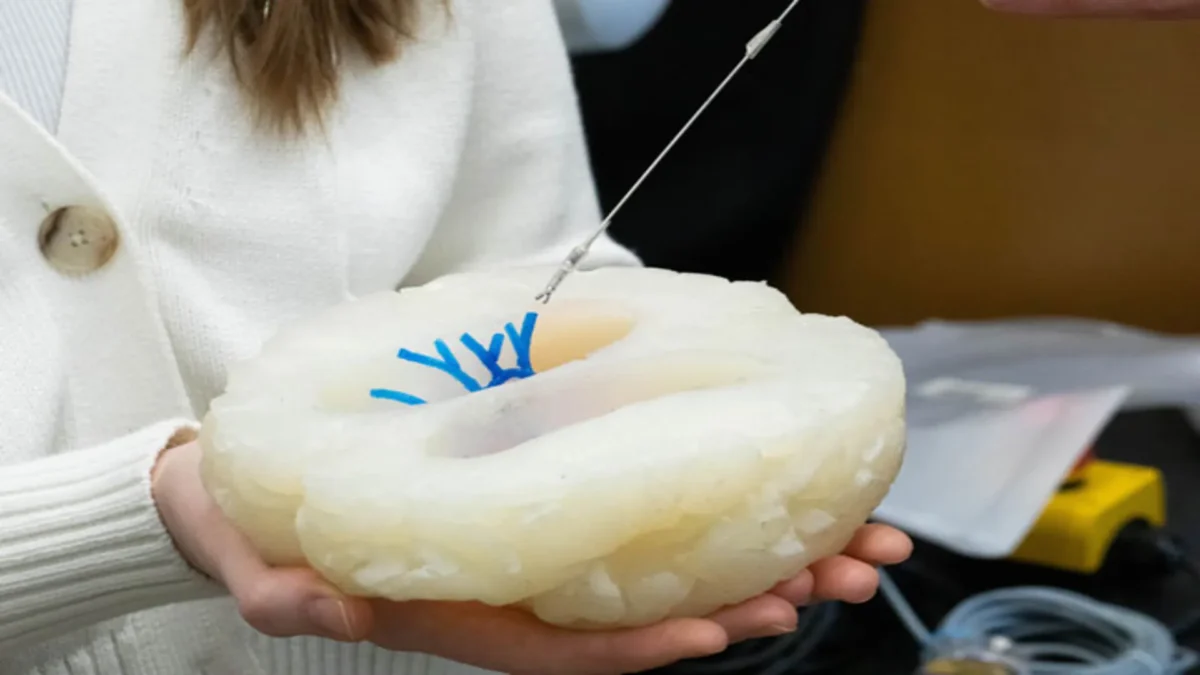
پژوهشگران برای آزمایش این ابزارها، یک نمونه مغز با اندازه واقعی ساختند، که از لاستیک سیلیکونی ساخته شده و شبیه شکل و ساختار مغز انسان است. آنها برای شبیهسازی ویژگیهای بافت مغز، از قطعات کوچک ژلاتینی و تکههای تمشک استفاده کردند، که به ایجاد شرایط واقعیتر کمک میکند.
مواد ژلاتینی به دلیل شباهت زیاد به ساختار جسم کالوزوم در مغز، برای شبیهسازی برشها با چاقو بسیار مناسب هستند. دکتر چانگیان هه، پژوهشگر سابق دانشگاه تورنتو توضیح داد که از تمشکها نیز برای آزمایش ابزارهای نگهدارنده استفاده شده است تا بررسی شود که آیا میتوان آنها را همانطوری برداشت که جراحان با بافت بیمار عمل میکنند. این روش به ایجاد شرایط واقعیتر در آزمایشها کمک کرده و دقت و کارایی آنها را افزایش داده است.
نتایج نشان داد که چاقوی مغناطیسی، برشهای دقیق و باریکی با میانگین ۰.۳ تا ۰.۴ میلیمتر ایجاد کرد، که دقت بیشتری نسبت به ابزارهای دستی سنتی داشت، که برشهای آنها در محدوده ۰.۶ تا ۲.۱ میلیمتر بود. در همین حال، ابزارهای نگهدارنده موفق به گرفتن هدف با نرخ موفقیت ۷۶ درصد شدند.
اریک دیلر اعلام کرد: «ما فکر نمیکردیم که این ابزارها در این حد خوب عمل کنند، چرا که پیش از این در محیطهای کاملاً کنترلشده آزمایش کرده بودیم و فکر میکردیم که رسیدن به این نقطه ممکن است سالها طول بکشد.»
وی تصریح کرد: «البته توسعه تکنولوژی دستگاههای پزشکی، به ویژه رباتهای جراحی، ممکن است سالها یا حتی دههها زمان ببرد.»
دیلر تأکید کرد: «این ایده واقعاً جذاب است و ما میخواهیم مطمئن شویم که این سیستم میتواند با ابزارهای تصویربرداری مانند سامانههای تصویربرداری پزشکی با استفاده از اشعه ایکس سازگار باشد.»




















