تیمی از فیزیکدانان، مهندسان و ریاضیدانان مؤسسه فناوری جورجیا در حال تقلید از حرکات هزارپا ها برای ایجاد یک نظریه جدید در حرکت چند پایی در ربات ها هستند.
به گزارش تکناک، آنها از طریق آزمایشهای خود دریافتند که رباتهایی با پاهای بیشتر میتوانند با چابکی روی سطوح ناهموار حرکت کنند، بدون اینکه هیچ گونه حسگر یا فناوری کنترلی اضافی داشته باشند.
دانیل گلدمن، دانشکده فیزیک، مؤسسه فناوری جورجیا می گوید: وقتی یک هزارپا را می بینید، اساساً حیوانی را می بینید که در دنیایی زندگی می کند که بسیار متفاوت از دنیای حرکت ما است.
حرکت ما تا حد زیادی تحت تاثیر اینرسی است. اگر پایم را بچرخانم، روی پایم فرود می آیم و جلو می روم. اما در دنیای هزارپاها، اگر آنها از تکان دادن اعضای بدن و اندام خود دست بردارند، فوراً از حرکت باز می ایستند.
تیم محققان نظریه ای را توسعه دادند که پیشنهاد می کند افزودن جفت هایی از پا به ربات توانایی آن را برای حرکت قوی بر روی سطوح چالش برانگیز افزایش می دهد. این مفهوم را افزونگی فضایی می نامند.
این منجر به ایجاد پاهای ربات می شود که به تنهایی بدون نیاز به حسگرهایی برای تفسیر محیط به کار می روند و می توانند حرکت کنند. اگر یکی از پاها از کار بیفتد، بقیه پاها بدون توجه به حرکت ادامه می دهند.
جستجو و نجات و موارد دیگر
باکسی چونگ، دانشجوی فوق دکتری فیزیک، گفت: با یک ربات دوپا پیشرفته، معمولاً حسگرهای زیادی برای کنترل آن در لحظه مورد نیاز است.
اما در کاربردهایی مانند جستجو و نجات، کاوش در مریخ یا حتی میکرو رباتها، نیاز به راندن یک ربات با سنجش محدود وجود دارد. دلایل زیادی برای چنین ابتکاری بدون حسگر وجود دارد. سنسورها میتوانند گران و شکننده باشند، یا برخی از محیطها آنقدر سریع تغییر می کنند که زمان پاسخدهی کنترلکننده حسگر به اندازه کافی وجود ندارد.
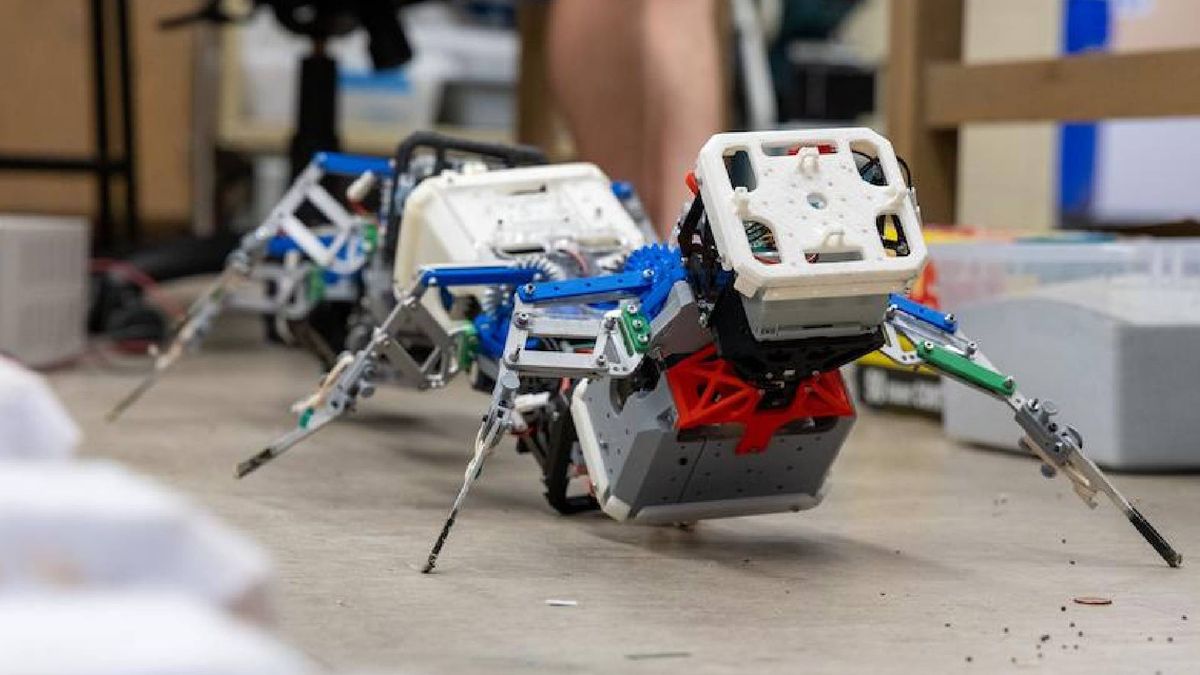
برای آزمایش این نظریه، محققان زمینی به شدت ناهموار ساختند و از رباتها خواستند تا در آن حرکت کنند و هر بار تعداد پاهای خود را دو عدد افزایش دادند که با شش پا شروع شد و در نهایت به 16 رسید. دانشمندان دریافتند که با افزایش تعداد پاها، ربات می تواند با چابکی بیشتری در سطح زمین حرکت کند، حتی بدون سنسور.
دکتر ژان تائو هی دانشجوی رشته رباتیک در بیانیهای گفت: واقعاً چشمگیر است که شاهد مهارت ربات چند پا در جهتیابی هم در زمینهای آزمایشگاهی و هم در محیطهای بیرونی باشیم.
ژان تائو می گوید: در حالی که ربات های دوپا و چهارپا به شدت به حسگرها برای عبور از زمین های پیچیده متکی هستند، ربات چند پا ما از افزونگی پاها استفاده می کند و می تواند کارهای مشابهی را با کنترل حلقه باز انجام دهد.