تیمی در دانشگاه توکیو لا استفاده از مولتی روتور (multirotor) در تعداد قابل توجهی قادر به ساخت یک پهپاد شدند که مثل اژدها در هوا حرکت میکند.
به گزارش تکناک، در این ارتقا، این ربات های پرنده قادرند شکل ساختاری خود را در هوا تغییر دهند که باعث ایجاد قابلیتهای بیسابقهای برای این پهپاد ها می شود.
این پهپاد که مثل اژدها در هوا پرواز میکند به صورت بخشهایی جداگانه ساخته می شوند و هر بخش دارای واحد محرکه چند ملخی مخصوص به خود است که به لطف سیستمهای گیمبال چند محوره قادر به جهت دهی نیروی رانش در مسیرهای متفاوت است. این بخشها به هم متصل شدهاند، اما می توانند در طیف وسیعی در جهتهای مختلف جابجا شوند.
تیم تحقیقاتی نحوه هماهنگ کردن همه این سیستمهای پیشرانه را به صورت درلحظه، حتی با تغییر شکل ساختار در حین پرواز، میسر کرده است. این مفهوم در ابتدا از ایده اژدهای پرنده و روشی که این جانوران افسانهای می توانستند بدن خود را به آرامی در هوا حرکت دهند الهام گرفته شده بود.
موجو ژائو مدیر پروژه می گوید: رباتهای الهام گرفته شده از موجودات زنده زیادی وجود دارد، مردم سگهای روباتی یا گربههای روباتی می سازند. من اهل چین هستم و وقتی کودک بودم، همیشه رویای اژدها را در سر می پروراندم. هرچند اژدها یک حیوان واقعی نیست، اما یک نماد مقدس در آسیا است. این ربات را به عنوان یک بازوی در حال پرواز انسان تصور کنید که می تواند در هوا کارهایی مانند عوض کردن یک چراغ یا باز کردن در را با مهارت انجام دهد. شما همچنین می توانید فکر کنید که این ربات می تواند مانند یک مار تغییر شکل دهد و فضاهای بسیار باریک را کشف کند.
در ویدیوی زیر وضعیت پهپاد اژدها این تیم تحقیقاتی را می توانید مشاهده می کنید. این پهپاد کمی لرزان و کمی کند است، اما با توجه به پیچیدگی کنترل یک پهپاد مولتی روتور که به طور مداوم جهت و شکل ساختاری خود را تغییر می دهد، بسیار چشمگیر است. نشان داده شده است که این ربات شروع به انجام وظایف اساسی، مانند هل دادن و کشیدن اشیا، و چرخیدن دورخود برای ایجاد یک گیره با قابلیت گرفتن، دستکاری و رها کردن اجسام تا وزن 1 کیلوگرم (2.2 پوند) است.
این یک ایده کاملاً خارقالعاده است، نوعی پنجه پرنده که می تواند در اطراف یک منطقه بچرخد، چیزهایی را بگیرد و کارهای مفیدی را با آنها انجام دهد. ویدیوی دیگری نشان می دهد که پهپاد اژدها از اتصالات پین مانند برای باز و بسته کردن دریچه های بزرگ، در جهت های بالا، پایین و افقی استفاده می کند.
این تیم چندین سال است که روی پهپاد اژدها کار می کند و وقتی نرمافزار کنترل پرواز سریعتر شد و با سرعت و سیالیت بیشتری شروع به حرکت کرد، دیدن پتانسیل چنین پلتفرم هوایی انعطافپذیری آسان می شود.
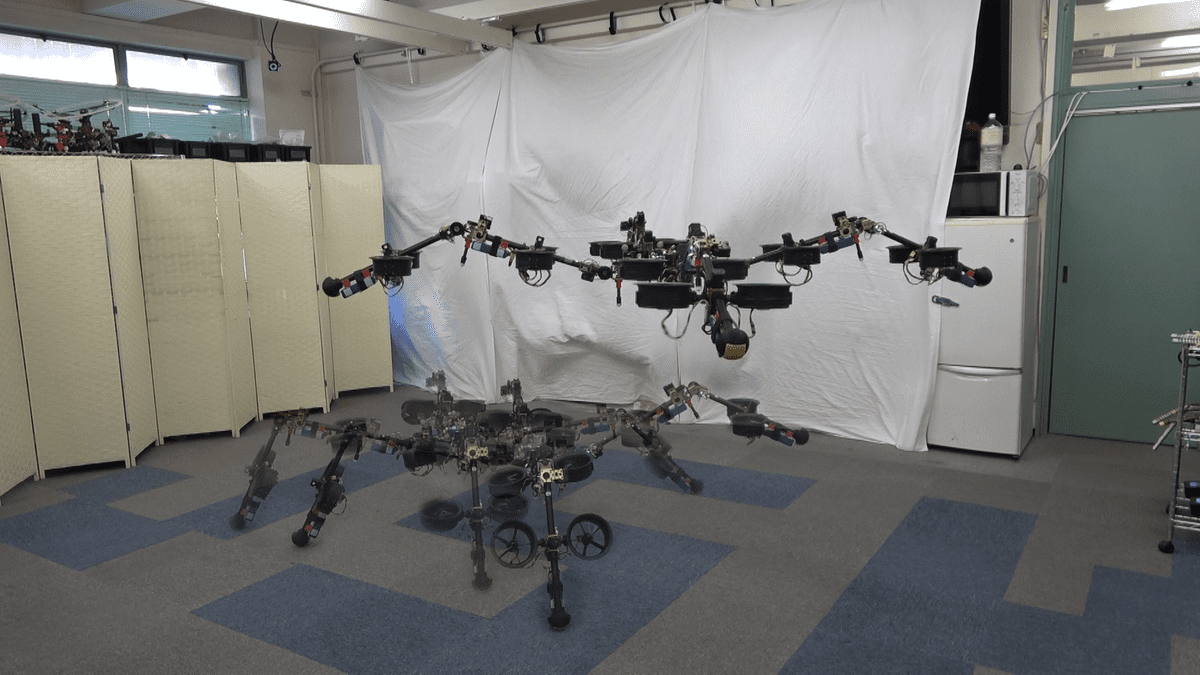
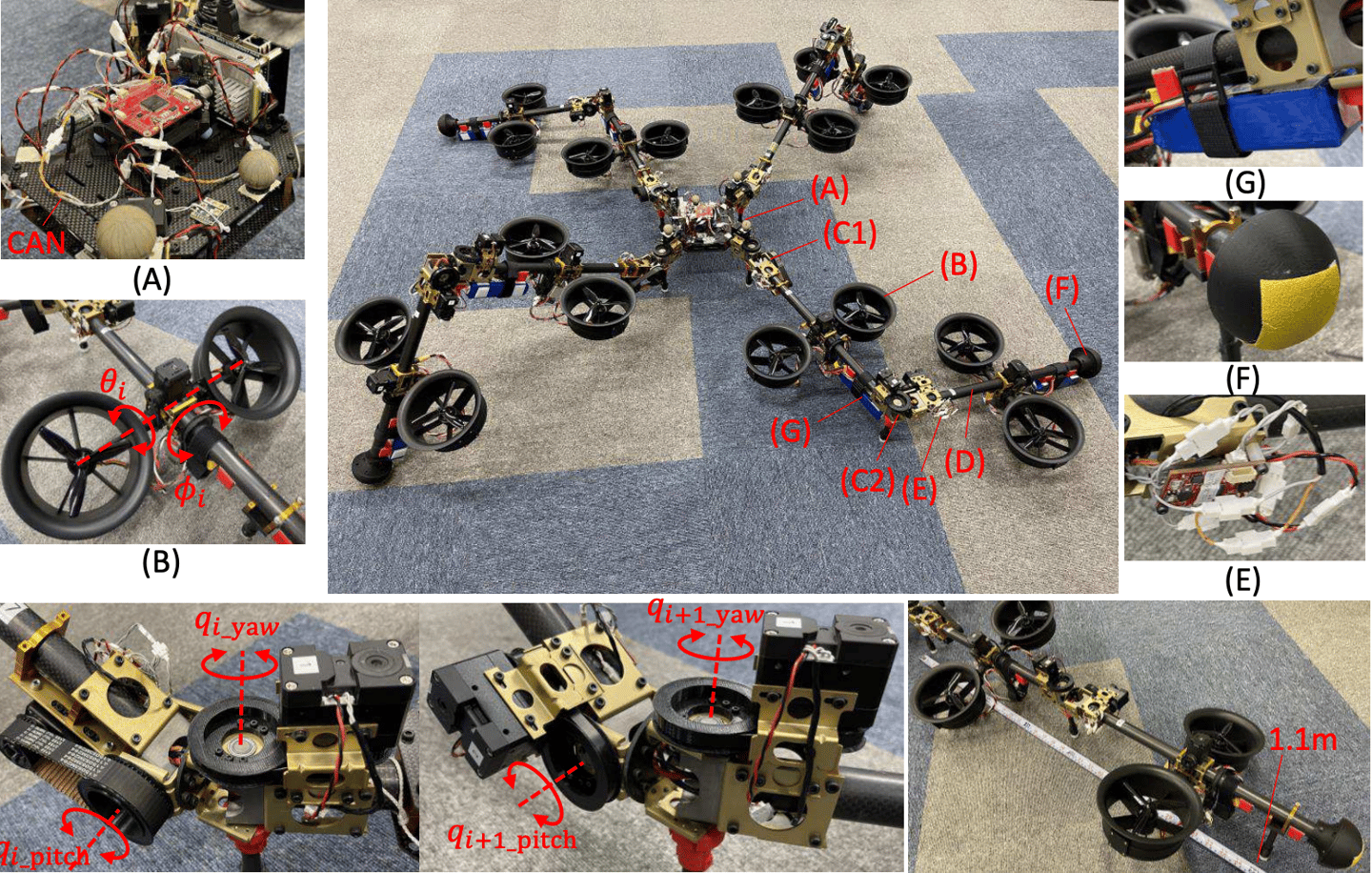
اکنون، این تیم برداشت عجیب تری از این مفهوم در قالب ربات جدید خود با نام اختصاری “SPIDAR”، ارائه کرده است.SPIDAR یک ربات چهارپا با مفاصل بازشونده در لگن و زانوی هر یک از پاها است. این مفاصل برای حرکت نیاز به موتور ضعیفی دارند، اما تیم، تلاش کرد تا استفاده از موتورهای اضافی را به حداقل برساند و این کار را با استفاده از واحدهای پیشران چندکوپتر بُرداری در هر بخش به عنوان نیروی محرکه اصلی برای حرکت دادن پاها استفاده می کند. این واحدهای پیشران همچنین برای بلند کردن سازه با وزن 15 کیلوگرمی (33 پوند) درهوا استفاده می شود.
همانطور که ویدیوی زیر نشان می دهد، چیزی که در نهایت با آن مواجه می شوید یک ربات عنکبوتی بسیار کند و پر سر و صدا است که پاهایش در این مرحله ضعیف و لرزان به نظر می رسد. همچنین به نظر می رسد که برای ماندن در هوا سخت کار می کند و ارتعاشات موزون در میان واحدهای پیشران به وضوح یک مشکل است. حرکت روی زمین کمی بی معنی به نظر می رسد با این وجود این پهپاد می تواند 20 دقیقه راه برود یا با باتری فعلی خود به مدت 9 دقیقه پرواز کند چراکه یک دقیقه پرواز مسیر بیشتری را از ده دقیقه پیاده روی طی می کند.
اما هنوز هم برخی احتمالات بسیار جالب مطرح می شود. با کمی توسعه بیشتر، این ربات به یک چنگال پرنده چهار نقطه ای تبدیل می شود که در این صورت به طور بالقوه قادر به نگه داشتن و دستکاری دو جسم در آن واحد است. مثلاً برداشتن درب یک ظرف شیشه ای و یا نگهداری یک جعبه در حالی که چیزی را از داخل آن بر می دارید یا داخل آن می گذارید.
واضح است که اینها نمونه های بسیار ابتدایی هستند اما با کمی تخیل، میتوانیم رباتهای ماهی مرکب پرنده به سبک ماتریکس را با هر تعداد بازوی کاربردی مشاهده کنیم. با وجود واحدهای نیروی محرکه در پاها یا بازوها وزن مرده ای بر روی بدنه پهپاد تحمیل نمی شود و هر کدام با توجه به محل قرارگیری بار، یک تکیه گاه هستند و می توانند با درجات مختلف اهرم بالابر را فراهم کنند.
چنین ماشین هایی می توانند چندین کار را همزمان انجام دهند و به طور بالقوه بازوهای آزاد خود را قفل کنند تا ساختار خود را در برابر دیوارها، سقف ها، کف یا سایر اجسام جامد که در آن نیرو یا اهرم اضافی مورد نیاز است، محکم کنند.
این یک مفهوم جذاب است، با پتانسیل ایجاد برخی از ربات های پرنده قابل توجه ومفید با قابلیت ها و اشکالی که واقعاً در طبیعت ندیده ایم و شبیه به افسانه های علمی تخیلی بوده اند.