در یک پیشرفت جدید در زمینه میکرو و نانوالکترونیک، دانشمندان دانشگاه کرنل رباتهایی کوچکتر از سر مورچهها با قابلیت راه رفتن بدون سیم و با کنترل مستقل ( ربات خودگردان ) ساختند.
به گزارش تک ناک، این ربات با انرژی خورشیدی کار می کند و برای چشم غیرمسلح نامرئی است،.در این ربات یک ریزپردازنده کوچک در نقش “مغز” وجود دارد که به آن اجازه می دهد بدون کنترلگر خارجی حرکت کند.
ساخت یک ربات خودگردان کار آسانی نیست. تا به حال، دانشمندان رباتهای میکروسکوپی ساختهاند که برای ایجاد تحرک در آنها به مهار توسط سیمهای خاص یا محرکهای خارجی مانند پرتوهای لیزر متمرکز نیاز داشتند. نوع جدیدی از ریزتراشه که در حال حاضر در Science Robotics ارائه میشود، کنترل رباتهای بدون اتصال را که اندازه آنها تنها کمی بزرگتر از عرض یک موی انسان است را بدون اتصال خارجی امکان پذیر می کند.
ایتای کوهن، استاد فیزیک در کالج علوم و هنر می گوید: “پیش از این، ما به معنای واقعی کلمه مجبور بودیم این “رشتهها” را (اشاره به سیمهای مهار خارجی که به رباط متصل می شوند) تغییر بدهیم تا بتوانیم هر نوع پاسخی حرکتی از ربات دریافت کنیم. اما اکنون که این “مغزها” را داریم،که استفاده از آنها در این ربات های میکروسکوپی مانند برداشتن سیمها از ماریونت است.
“مغز” روی برد الکترونیکی
اندازه میکرو ربات الکترونیکی جدید که با “مغز” کار می کند تنها 100 تا 250 میکرومتر است. این میکرو ربات از سه سیستم اصلی تشکیل شده است: یک مدار یکپارچه برای کنترل و جهت، یک منبع تغذیه، به عنوان مثال، یک سلول فتوولتائیک که قادر به مهار انرژی از یک منبع نور است و مجموعه ای از پایه های لولایی که ربات را قادر می سازد با سرعتی بیش از 10 میکرومتر در ثانیه حرکت کند .
کنترل خودکار توسط نیمه هادی های مکمل از جنس اکسید های فلزی که به نام CMOS شناخته می شوند امکان پذیر می شود. این نیمه هادی ها از هزاران ترانزیستور، دیود، خازن و مقاومت تشکیل شده اند که مسئول کنترل دستگاه های الکترونیکی هستند. حرکت با استفاده از سیگنالهای فرکانس موج مربعی تغییر فاز فعال میشود. پایه های ربات از محرک های مبتنی بر پلاتین ساخته شده اند. انرژی الکتریکی مدار الکترونیکی و اندام های حرکتی دستگاه از طریق فتوولتائیک تامین می شود.
این تیم برای نشان دادن یکپارچگی CMOS سه ربات درست کرد: یک ربات Purcell دو پا، یک ربات مورچه ای شش پای پیچیده تر که مانند یک حشره راه می رود و یک ربات چهارپا (سگ-ربات) که می تواند با سرعت متغیر حرکت کند.
فناوری ربات خودگردان جدید فرصت های زیادی را در زمینه کاربردهای این میکرو ماشین ها ایجاد می کند. پیشبینی میشود که ریزماشینهای مستقل روشهای تشخیصی و درمانی در پزشکی را به میزان قابل توجهی افزایش دهند. میکرورباتهای خودگردان را میتوان برای ردیابی باکتریهای خاص، مکانیابی مواد شیمیایی سمی، مقابله با آلایندهها، پیاده سازی در میکروجراحی و کمک به پاکسازی شریانها با حذف plaque استفاده کرد.
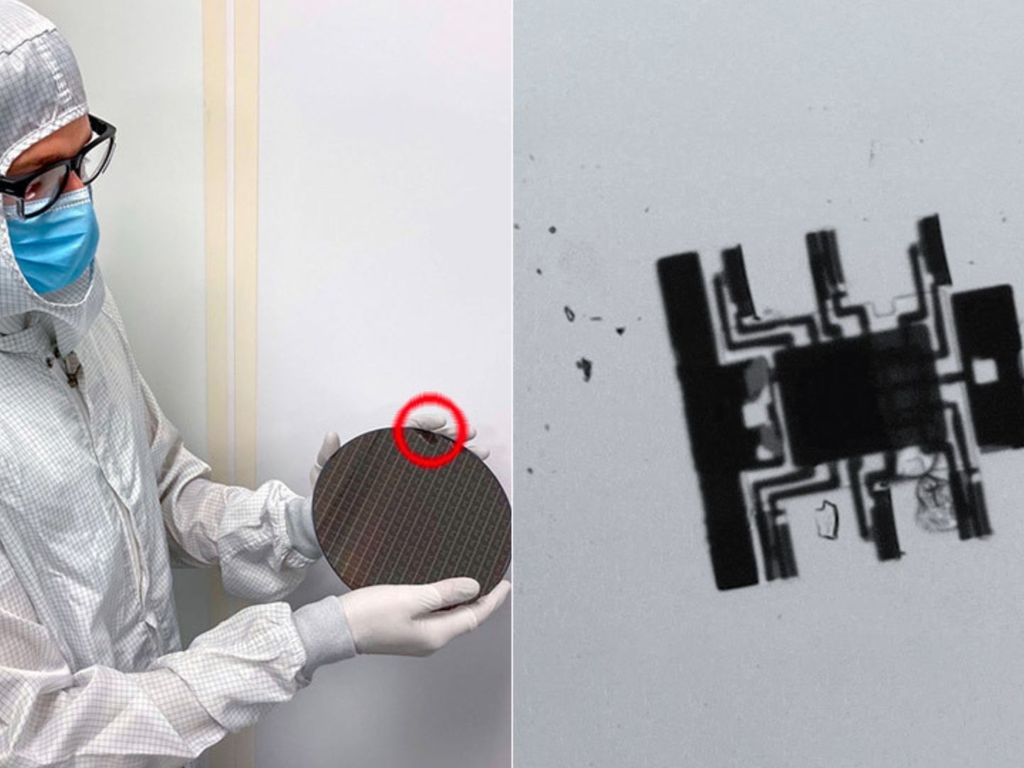
برتری این ساختار الکترونیکی در استفاده از قطعات الکترونیکی بسیار کم مصرف آن نهفته است. با روش ساخت جدید در مرکز علوم و فناوری کورنل، محققان به جای استفاده از فرآیندهای سنتی ساخت نیمه هادی، بسیاری از قطعات الکترونیکی را در یک ویفر سیلیکونی مونتاژ کردند. این روش به نوبه خود آنها را قادر می سازد تا از یک مدار واحد برای کنترل موثر کل میکروربات استفاده کنند.
در حالی که این یک جهش قابل توجه به سمت میکرو رباتیک خودگردان است، دستگاه نسبتاً ساده است و فقط باید راه رفتن را بدون هیچ گونه ارتباط واقعی با کاربر برای تشخیص جهت حرکت انجام دهد. با این حال، محدودیت هوشمند دستگاه را می توان با استفاده از یک فرآیند ساخت سیلیکون بزرگ – 180 نانومتر – تشریح کرد و این در حالی است که در پروژه های صنعتی پیشرفته از فرآیندهای زیر 10 نانومتر استفاده می کنند.
در آینده، ساخت مدارهای نانو اجازه می دهد تا قطعات الکترونیکی بیشتری در فضای کوچکتری نصب شوند، بنابراین ساختارهای های الکترونیکی بسیار هوشمندتر امکان پذیر می شود.