فهرست مطالب
دانشمندان با استفاده از شبیهساز و یادگیری تقویتی به رباتهای دیزنی آموزش دادند تا هنگام سقوط، بدون آسیب به بخشهای حساس فرود بیایند.
به گزارش سرویس رباتیک تکناک، با توجه به این تحقیق متخصصان دیزنی و مهندسان دانشگاهی، حالا رباتها قادر هستند سقوط خود را کنترل کنند و فرودی ایمن داشته باشند.
تیم تحقیقاتی با دقت بررسی کرده است که چرا رباتها زمین میخورند، چه آسیبهایی رخ میدهد، بیشترین ضربهها کجا وارد میشود و چه زمانی شدیدترین برخوردها اتفاق میافتد.
محققان به جای مبارزه با جاذبه، روش جدیدی ارائه کردهاند که ربات بتواند با جابهجایی اعضا و تغییر وضعیت در هوا، روی زمین به آرامی و ایمن فرود بیاید و به این ترتیب از صدمات به سر، باتری و دیگر اجزای حساس جلوگیری شود.
حتما بخوانید: اولین ربات انساننمای روسیه هنگام معرفی با سر به زمین خورد! + ویدیو
بیشتر بخوانید: ربات انساننمای IRON رونمایی شد + ویدیو
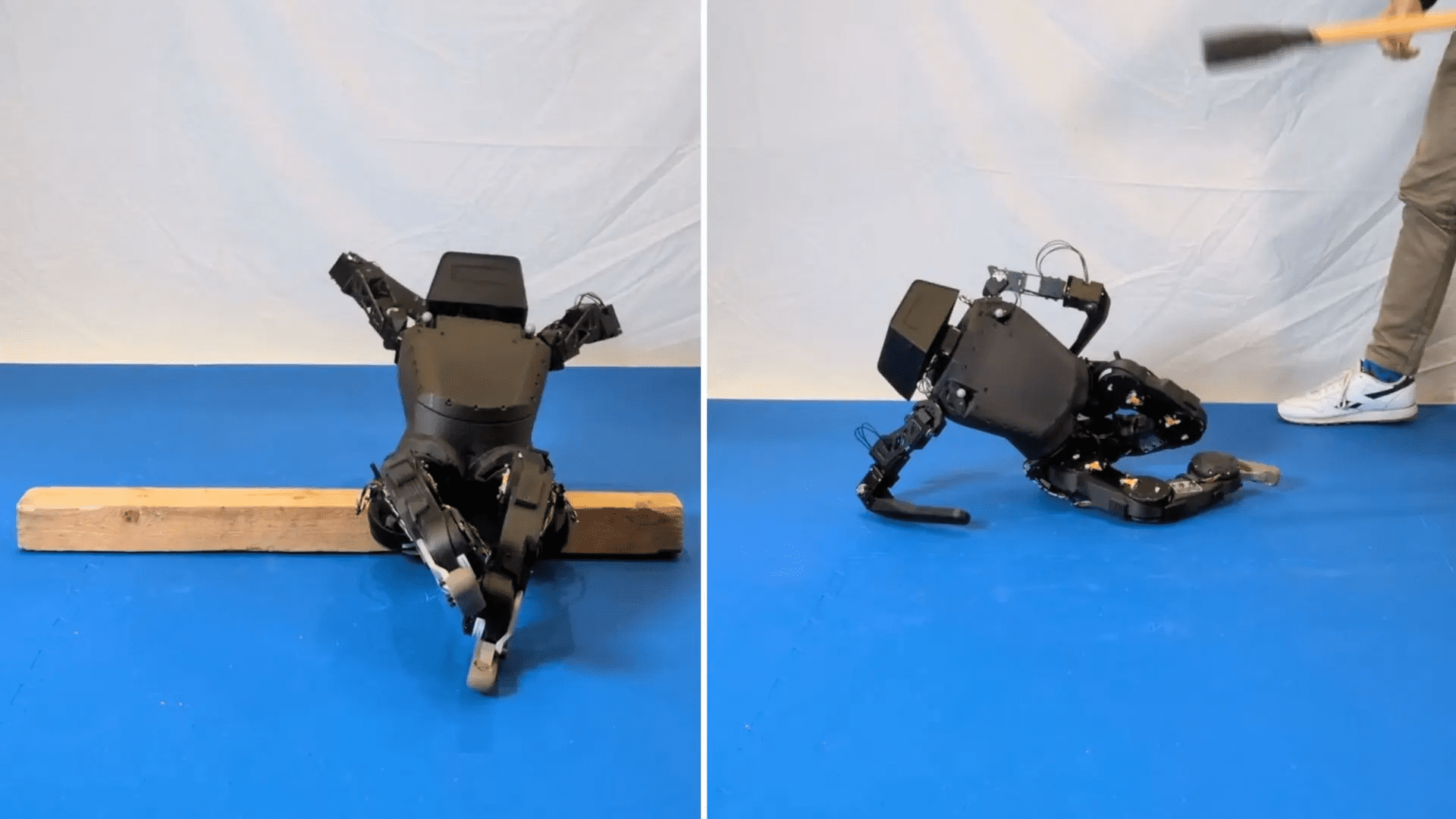
پروژه یادگیری تقویتی ربات هوشمند دیزنی توانست به رباتها مهارت سقوط ایمن بیاموزد. در این روش، هزاران ربات در شبیهسازی سقوط کردند و هر برخورد، دادههای ارزشمندی درباره موفقیت یا شکست حرکات تولید کرد. رباتهای هوشمند دیزنی با تحلیل این دادهها، توالی حرکاتی را یاد گرفتند، که بیشترین حفاظت از بخشهای حساس را فراهم میکرد و ضربه برخورد را کاهش میداد، در حالی که حرکات نامنظم یا خارج از هدف باعث کسر امتیاز میشد.
شبیهساز شامل انواع سقوطها از سرخوردگی جانبی با سرعت دو متر بر ثانیه تا غلتشهای سریع با چرخش باسن بود. همچنین سرعتها در هر بار سقوط، تصادفی بود تا ربات تنها یک مسیر ثابت یاد نگیرد. برای گسترش دادههای حرکات، تیم ۲۴,۰۰۰ وضعیت پایدار طراحی کرد و رباتها را از ارتفاع کمر رها کرد. ۱۰ وضعیت پایانی نیز توسط هنرمندان با خلاقیتهای بصری مانند حالتهای خمیده یا افتادن پهن ساخته شد، همه حرکتها محدودیتهای مفاصل و موتورهای واقعی را رعایت میکردند و نویز تصادفی نیز اضافه شد تا ربات بتواند ضربههای کوچک و غیرمنتظره را مدیریت کند.
01
از 01چگونگی آموزش سقوط بدون آسیب به رباتهای دیزنی
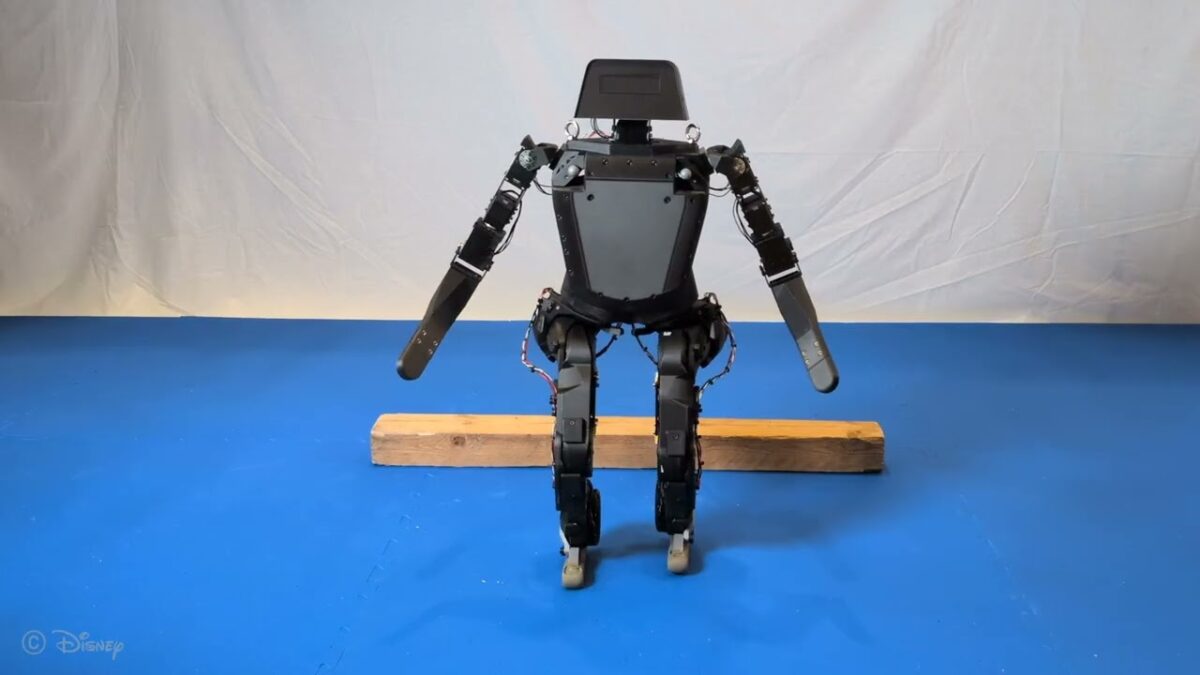
تمرین و آموزش سیستم در مدت دو روز روی کارتهای گرافیک قدرتمند انجام شد و همزمان ۴,۰۰۰ ربات مجازی سقوط کردند. یک شبکه عصبی کوچک، زاویه مفاصل، وضعیت بدن و دادههای حرکتی را پردازش و پنجاه بار در ثانیه فرمان صادر میکرد. این روش با بهینهسازی سیاست نزدیک (PPO) رفتار ربات را به صورت مرحلهبهمرحله و بدون جهش ناگهانی تنظیم کرد. شبیهساز فشار تماس را کاهش میداد و حساسیت هر قسمت بدن را به طور جداگانه تنظیم میکرد؛ پاها نرم بودند و سر بیشترین محافظت را میطلبید. پس از پایان تمرین، ربات هوشمند دیزنی توانست در یک لحظه از حالت افتاده شل به حالت جمع و محافظتی تغییر وضعیت دهد. سپس این سیاست روی یک ربات فلزی واقعی ۱۶ کیلوگرمی با دو پای فنری و بازوهای مکانیکی اعمال شد. سیستم ضبط حرکت، حرکات ربات را دنبال میکرد و دادهها را به کنترلر بازمیگرداند. آزمایشها نشان داد که رباتها دیگر نباید از سقوط ناگهانی هراس داشته باشند و میتوانند با کنترل کامل فرود بیایند.
نتایج این تحقیق در arXiv منتشر شده است.