پژوهشگران سوییسی رباتهایی ساختهاند که بهجای فلز و پلاستیک از پوستههای بیرونی سختپوستان استفاده میکنند تا طراحی پایدار و چرخهای را وارد مهندسی رباتیک کنند.
به گزارش سرویس رباتیک تکناک، پژوهشگران دانشکده مهندسی EPFL در لوزان سوئیس با استفاده از پوستههای دورریز بخش شکمی خرچنگ دریایی موفق شدند یک بازوی رباتیک، یک جفت گریپر نرم و یک ربات شناگر بسازند. این تیم قصد دارد که نشان دهد رباتها الزاماً به مواد مصنوعی متکی نیستند و میتوان از پسماند غذایی به عنوان بخشی از ساختار مکانیکی دستگاه استفاده کرد. آنها میگویند که این کار میتواند الگوی طراحی رباتیک را متحول کند و آن را به سمت پایداری و اقتصاد چرخهای حرکت دهد.
این تیم تأکید میکند که پوستههای بیرونی سختپوستان ترکیبی از بخشهای معدنی و غشاهای مفصلی هستند. این ترکیب باعث میشود بخشها هم سفت باشند و هم انعطافپذیر باقی بمانند. همین ساختار طبیعی اجازه میدهد که هر بخش مستقل حرکت کند و نیرو را سریع منتقل کند. پژوهشگران میگویند که همین ویژگیها برای ساخت رباتهایی که نیاز به حرکت دقیق و کنترلشده دارند مناسب است. آنها معتقد هستند طبیعت از ابتدا این راهحل را طراحی کرده است و رباتیک میتواند از این الگو استفاده کند.
بخوانید: ربات MobED هیوندای با قابلیتهای بینظیر رونمایی شد + ویدیو
جوزی هیوز، رئیس آزمایشگاه میگوید که ادغام ساختارهای طبیعی با فناوری مهندسیشده میتواند فصل تازهای در طراحی رباتها باشد. او توضیح میدهد که این کار فقط تقلید از طبیعت نیست، بلکه نوعی بازنگری در نحوه انتخاب مواد اولیه است. او میگوید که استفاده دوباره از پسماند غذایی یک چرخه طراحی پایدار ایجاد میکند. این چرخه به پژوهشگران اجازه میدهد مواد را بازیافت کنند و برای وظایف جدید بهکار گیرند. او تأکید میکند که اگر مادهای قرار نیست دوباره در طبیعت رها شود، باید قابلیت استفاده مجدد داشته باشد.
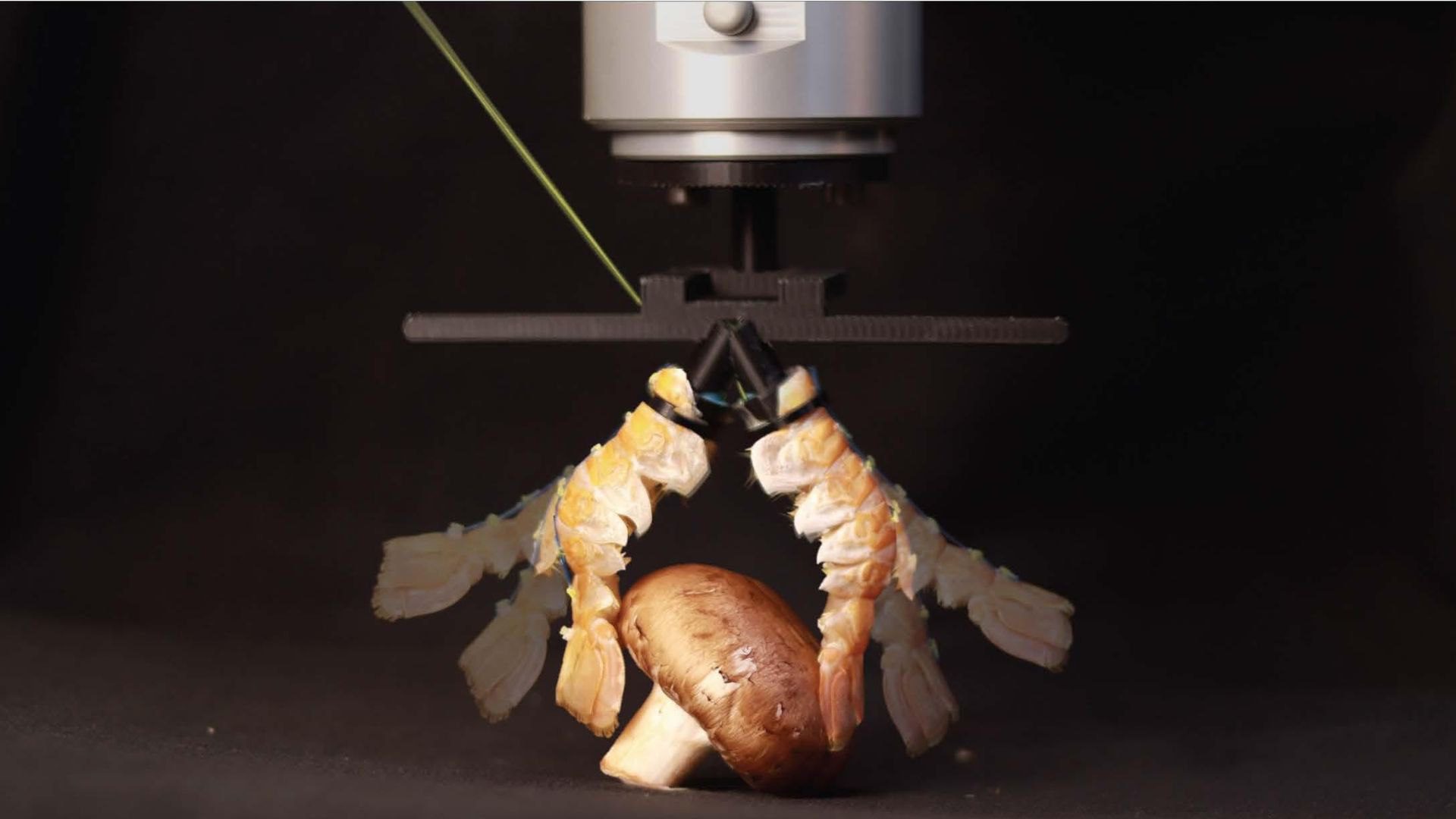
پژوهشها در مجله Advanced Science منتشر شده است و سه نمونه عملی از ربات با پوستههای بیرونی سختپوستان ارائه میدهد. نمونه اول یک بازوی رباتیک است که توانست وزنی تا ۵۰۰ گرم را بلند کند و اشیا را در محدودههای مشخص جابهجا نماید. نمونه دوم یک جفت گریپر نرم است که توانست هم گوجهفرنگی ظریف و هم اشیای سختی مانند خودکار را بدون آسیب گرفتن در دست بگیرد. نمونه سوم یک ربات شناگر است که با استفاده از بالههای ساختهشده از همان پوستهها در آب حرکت کرد. سرعت این ربات هنگام آزمایش به ۱۱ سانتیمتر در ثانیه رسید.
برای ساخت این سیستمها پژوهشگران ابتدا الاستومر را در بخشهای مختلف پوسته تزریق کردند تا زاویه خم شدن و باز شدن قابل کنترل شود. سپس سازه روی یک پایه موتوردار نصب شد و یک لایه سیلیکونی روی آن قرار گرفت تا عمر مفید دستگاه افزایش یابد. به گفته تیم تحقیق، بیشتر قطعات داخلی پس از پایان کار قابل جدا شدن است. این ویژگی یکی از اهداف اصلی پروژه یعنی طراحی چرخهای و بازیافتپذیر را حمایت میکند.
پیشنهادی: بریتانیا نخستین ربات جوشکار فضایی را می سازد
Sareum Kim، نویسنده اول مقاله میگوید که این پروژه یکی از نخستین تلاشها برای تبدیل پسماند غذایی به بخشی از یک سامانه رباتیکی است. وی بیان میکند که هدف تیم تحقیق این است که ثابت کند مواد طبیعی که قبلاً دور ریخته میشدند، میتوانند در ساخت رباتهای آینده نقش داشته باشند. او تأکید میکند که این کار تنها یک نمونه اولیه است، اما ثابت میکند مسیر پایداری در رباتیک امکانپذیر است.
البته کار با مواد زیستی چالشهای خود را دارد. هیچ دو پوسته langoustine شکل دقیقاً یکسانی ندارند. این تفاوتها باعث میشود که عملکرد هر نمونه کمی متفاوت باشد. تیم میگوید که مرحلههای بعدی پژوهش نیازمند سامانههای کنترلی تطبیقی و روشهای تقویت یکنواخت است تا این تفاوتها مدیریت شود. آنها در عین حال بیان میکنند که مزایای ساختارهای طبیعی همچنان ارزش ادامه تحقیق را دارد.
بخوانید: کنترل موفقیتآمیز بازوی رباتیک با تراشه مغزی نورالینک
پژوهشگران باور دارند که این روش میتواند در کاربردهایی مانند پلتفرمهای پایشی و حتی ایمپلنتهای پزشکی مفید باشد. آنها میگویند که طبیعت همیشه زیباترین و گاهی کارآمدترین راهحلها را ارائه میدهد. Hughes میگوید که مهندسی امروز باید یاد بگیرد از این ساختارها استفاده کند، چرا که ترکیب طبیعت و فناوری میتواند نسل تازهای از ماشینهای کارآمد و سازگار با محیط زیست را ایجاد کند.