ساختارهای دوپایدار در طبیعت به دلیل پاسخ سریع و تشدید نیرو حتی با کوچکترین تحریک فیزیکی بی نظیر هستند و می توانند در علم رباتیک مورد استفاده قرار بگیرند.
به گزارش تکناک، مهار دوپایداری و ناپایداری برای آزادسازی سریع انرژی ذخیره شده در ساختارهای دوپایدار می تواند عملکرد ربات را در چندین زمینه بهبود بخشد، به عنوان مثال، حرکت با سرعت بالا، سنجش تطبیقی و درک سریع.
با این حال، مطالعات تحقیقاتی فعلی بر روی ساختارهای دوپایدار عمدتاً بر روی حالتهای پایدار آنها تمرکز میکنند، در حالی که حالتهای میانی با طیف وسیعی از موانع انرژی قابل تنظیم در مطالعات کنونی وجود ندارد.
اخیراً، یک تیم تحقیقاتی به سرپرستی دکتر لی یینگ تیان از موسسه فناوری پیشرفته شنژن (SIAT) آکادمی علوم چین، نوعی ساختار دوپایدار فوقالعاده قابل تنظیم با موانع انرژی قابل برنامهریزی و نیروهای ماشهای قابل اعمال در اندازه های مختلف را پیشنهاد کردهاند. ساختارها همچنین می توانند با پیکربندی های هندسی متنوع، ابعاد، مواد و روش های فعال سازی متفاوت برای کاربردهای مختلف روباتیک سفارشی شوند.
این کار تحقیقاتی در ژورنال Cell Reports Physical Science در 18 آوریل منتشر شد.
در این کار تحقیقاتی، حالت های میانی عظیم با موانع انرژی قابل برنامه ریزی قبل از رسیدن ساختار دوپایا به نقطه بحرانی گزارش شده است.
با تغییر شکل ساختار از حالت کم پایدار به هر حالت میانی، سد انرژی کاهش مییابد، به این معنی که تحریکهای خارجی کوچکتری برای ایجاد جهش سریع ساختارهای دوپایدار مورد نیاز است. همانطور که مانع انرژی کاهش می یابد، تحریک خارجی مورد نیاز ظریف و ظریف تر می شود. بدین ترتیب محققان به طیف وسیعی از نیروهای ماشه قابل تنظیم برای ساختار دوپایدار قابل کنترل پیشنهادی دست یافتند.
برای نشان دادن قابلیت تنظیم سازه پیشنهادی، محققان مجموعهای از آزمایشها را انجام دادند و نشان دادند که نیروی ماشه یک سازه را میتوان تا 0.1 درصد از حداکثر مقدار آن تنظیم کرد، در حالی که اختلاف وزن بلند شده با استفاده از گیرههای که سازه یکسان با پارامتر های طراحی متفاوت ساخته شده بودند 107 برابر بیشتر بود.
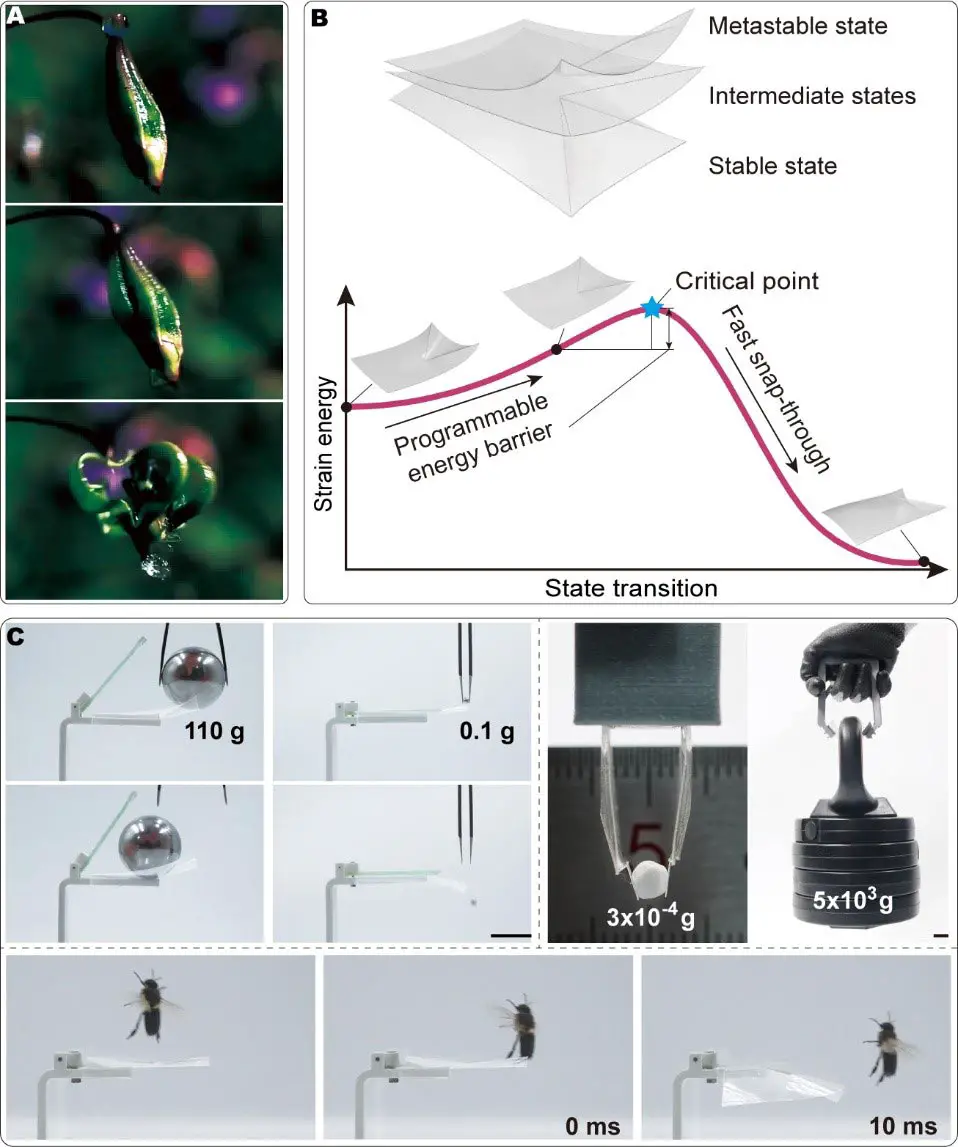
دکتر لی گفت: ما میتوانیم ساختار را در حالت فوقالعاده حساس تنظیم کنیم تا به یک تحریک بسیار کوچکی به ملایمت بال زدن یک زنبور پاسخ دهد، در حالی که میتوانیم همان ساختار را در حالتی غیر حساس قرار دهیم که حتی یک توپ با وزن 110 گرم نتواند سطح انرژی آن را بشکند.
برای اعتبارسنجی پتانسیلهای سازه در کاربردهای مختلف، نمونههای اولیه مختلفی از جمله مگس گیر رواتیک، گیرهها، جامپر، شناگر، سوئیچ حرارتی و سیستم مرتبسازی توسعه یافتند. نمونههای اولیه نشان میدهند که تله مگس گیر رواتیک با یک مادگی حساس میتواند با تحریک فیزیکی در 10 میلیثانیه فعال شود. گیرنده دویستابی می تواند یک توپ تنیس روی میز با سرعت بالا (10 متر بر ثانیه) را بگیرد و جامپر حداقل می تواند به ارتفاع بیش از 24 برابر ارتفاع بدن خود برسد و سایر موارد.
دکتر لی گفت: ما خوشحالیم که متوجه شدیم ساختار پیشنهادی ما می تواند در چنین طیف گسترده ای از کاربردها استفاده شود، که عملکرد برتر را نشان می دهد. این کار میتواند مرزهای طراحی ساختار دوپایدار را گسترش دهد و راهی برای طراحیهای آینده در رباتیک، مهندسی زیست پزشکی، معماری و هنر تجسمی ایجاد کند.