محققان MIT گام های مهمی در جهت ساخت ربات هایی برداشته اند که عملاً می توانند هر چیزی را با در نظر گرفتن مسائل اقتصادی در واقعیت مونتاژ کنند.ربات مونتاژ تکثیر
به گزارش تکناک،این سازه ها می توان شامل وسایل نقلیه تا ساختمانها و رباتهای بزرگتر شود.
مطالعات نشان میدهد اشیایی مانند بال تغییر شکلپذیر هواپیما یا یک ماشین مسابقه واقعی تشکیل شده از قطعات کوچک یکسان و سبک وزن، قابل مونتاژ است و دستگاه های رباتیک برای انجام برخی از این کارهای مونتاژ نیز قابل ساخت هستند.ربات مونتاژ تکثیر
اکنون، تیم نشان داده است که هم رباتهای مونتاژکننده و هم قطعات سازه ای که قرار است ساخته شود همگی میتوانند از واحدهای فرعی مشابهی ساخته شوند و رباتها میتوانند به طور مستقل در تعداد زیادی حرکت کنند تا مونتاژهایی در مقیاس بزرگ را به سرعت انجام دهند.ربات مونتاژ تکثیر
کار جدید در ژورنال Nature Communications Engineering و در مقاله ای توسط امیر عبدالرحمن، دانشجوی دکتری CBA، نیل گرشنفلد، پروفسور و مدیر CBA و سه نفر دیگر گزارش شده است.
گرشنفلد میگوید که ساخت یک سیستم ربات خود مونتاژ خود تکثیر شونده کاملاً مستقل که قادر به مونتاژ ساختارهای بزرگتر، از جمله روباتهای بزرگتر و قابلیت برنامهریزی برای فهمیدن بهترین توالی ساخت باشد، تا سالها دور از دسترس است. اما کار جدید گامهای مهمی را به سوی این هدف برمیدارد، از جمله تعیین وظایف پیچیده مربوط به اینکه چه زمانی رباتهای بیشتری باید ساخته شود و این ربات ها چقدر باید بزرگ باشند، همچنین نحوه سازماندهی دستهای از رباتها در اندازههای مختلف برای اینکه سازه موردنظر مطلوب ساخته شود و این دسته از ربات ها به یکدیگر برخورد نکنند.
همانند آزمایشهای قبلی، سیستم جدید شامل سازه های بزرگ و قابل استفاده است که از شکل منظمی از زیر واحدهای کوچک یکسان به نام وکسل (معادل حجمی یک پیکسل دو بعدی) ساخته شدهاند.
اما در حالی که وکسلهای قبلی قطعات ساختاری کاملاً مکانیکی بودند، تیم اکنون وکسلهای پیچیدهای را توسعه دادهاند که هر کدام میتوانند هم نیرو و هم داده را از یک واحد به واحد دیگر منتقل کنند. این میتواند ساخت سازههایی را امکانپذیر کند که نه تنها بارها را تحمل کنند، بلکه کارهایی مانند بلند کردن، جابجایی و دستکاری مواد از جمله خود وکسلها را نیز انجام دهند.
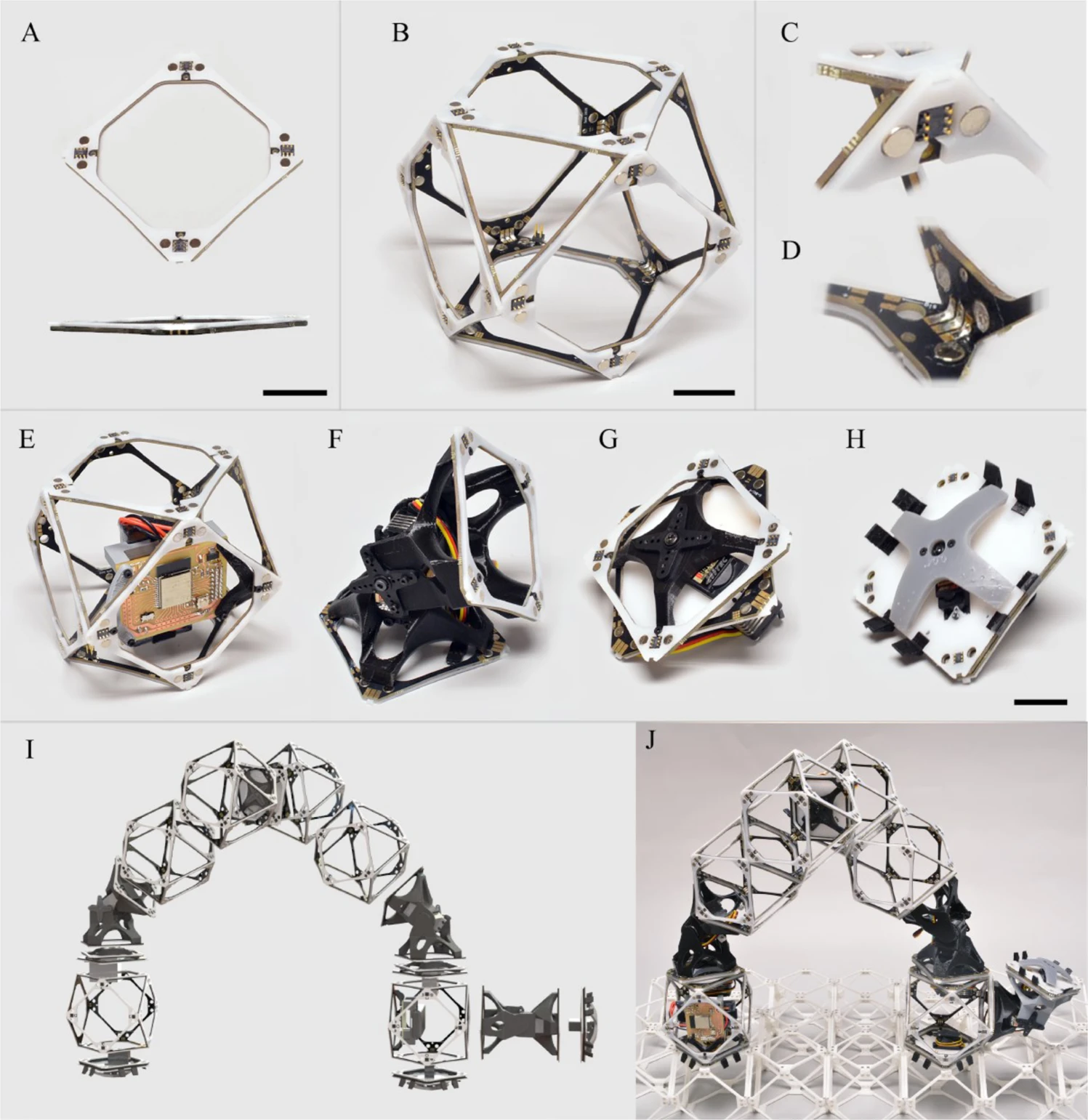
گرشنفلد میگوید: وقتی ما این سازهها را میسازیم، شما باید هوشمندانه بسازید. در حالی که نسخههای قبلی رباتهای مونتاژ گر توسط دستههایی از سیم به منبع تغذیه و سیستمهای کنترل آنها متصل میشدند، آنچه اکنون پدیدار شده، ایده ساخت الکترونیک پایه وکسلهایی بود که برق، دادهها و همچنین نیرو را منتقل میکنند. او با نگاهی به سیستم جدید در حال کار، اشاره میکند: «هیچ سیمی وجود ندارد. فقط ساختار وجود دارد.”
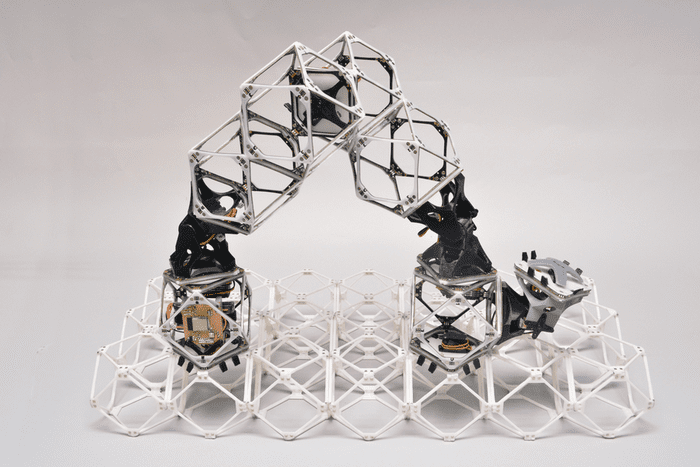
خود ربات ها از رشته ای متشکل از چندین وکسل تشکیل شده اند که سر به سر به هم وصل شده اند. اینها می توانند وکسل دیگری را با استفاده از نقاط اتصال در یک انتها بگیرند، سپس مانند یک کرم به موقعیت مورد نظر جایی که وکسل می تواند به ساختار در حال رشد متصل شود حرکت کنند، و در آنجا رها شود.
گرشنفلد توضیح می دهدکه سیستم قبلی که توسط اعضای گروهش نشان داده شده بود، می توانست سازه های تصادفی بزرگ را بسازد، زیرا اندازه آن سازه ها به یک نقطه معین در رابطه با اندازه ربات مونتاژگر می رسید، با این حال، این فرآیند به دلیل مسیرهای طولانی تری که هر ربات باید طی کند تا هر قطعه را به مقصد برساند بسیار ناکار آمد بود. در این مرحله، با سیستم جدید، رباتها میتوانستند تصمیم بگیرند که زمان آن رسیده است که نسخه بزرگتری از خود بسازند که بتواند به مسافتهای طولانیتری برسد و زمان سفر را کاهش دهد. حتی در یک سازه بزرگتر ممکن است به چنین مرحله دیگری نیز نیاز باشد، در عین حال بخشهایی از یک سازه که شامل جزئیات زیادی است ممکن است به روباتهای کوچک بیشتری نیاز داشته باشد.
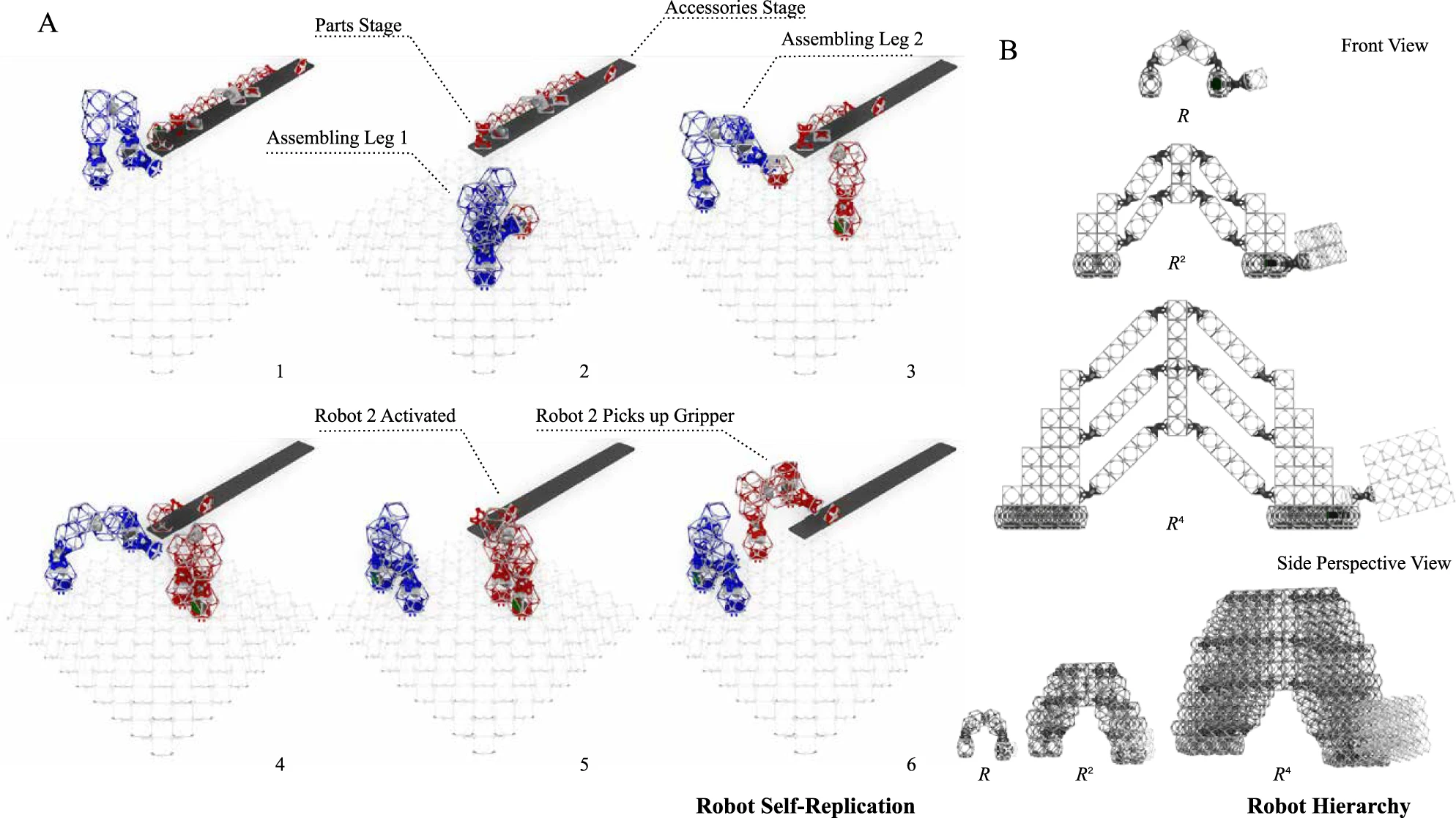
عبدالرحمن میگوید، همانطور که این دستگاههای رباتیک روی مونتاژ چیزی کار میکنند، در هر مرحله از راه با انتخابهایی روبرو میشوند اینکه آیا میتواند یک سازه بسازد، آیا میتواند ربات دیگری با همان اندازه بسازد، یا آیا میتواند یک ربات بزرگتر از خود بسازد. بخشی از کاری که محققان بر روی آن تمرکز کردهاند، ایجاد الگوریتمهایی برای چنین تصمیمگیری هایی است.
او می گوید: به عنوان مثال، اگر می خواهید یک مخروط یا یک نیم کره بسازید، چگونه باید برنامه ریزی مسیر را شروع کنید و چگونه این شکل را به مناطق مختلفی تقسیم کنید تا ربات های مختلف بتوانند روی آن کار کنند.
نرمافزاری که آنها توسعه دادهاند به کاربر اجازه میدهد هندسه پروژه را به نرم افزار وارد کند و خروجی دریافت کند که نشان میدهد اولین بلوک کجا قرار گیرد، و بلوک های بعد از آن، بر اساس فواصلی که باید طی شود نصب می شوند.
گرشنفلد می گوید که هزاران مقاله در مورد برنامه ریزی مسیر برای روبات ها منتشر شده است. اما مرحله بعد از آن، یعنی اینکه ربات باید تصمیم بگیرد که یک نوع متفاوت از ربات را بسازد بحث جدیدی است و واقعاً هیچ مطالعه ای در این مورد انجام نشده است.
در حالی که سیستم آزمایشی میتواند مونتاژ را انجام دهد و شامل ارتباطات برق و داده است، در نسخه های فعلی اتصال دهنده های بین زیر واحدهای کوچک به اندازه کافی قوی نیستند که بارهای لازم را تحمل کنند. این تیم، از جمله دانشجوی فارغ التحصیل میانا اسمیت، اکنون بر روی توسعه اتصال دهنده های قوی تر تمرکز کرده اند. گرشنفلد میگوید: این رباتها میتوانند راه بروند و قطعات را نصب کنند، ما تقریباً اما نه کاملاً در نقطهای هستیم که یکی از این رباتها دیگری را میسازد و از آن عبور میکند و این به تنظیم دقیق جزئیاتی مانند نیروی محرک ها و استحکام اتصالات مربوط می شود.ربات مونتاژ تکثیر
در نهایت، چنین سیستم هایی ممکن است برای ساخت طیف گسترده ای از سازه های بزرگ و با ارزش استفاده شوند. به عنوان مثال، در حال حاضر نحوه ساخت هواپیماها شامل کارخانههای بزرگ با جرثقیل های سقفی بسیار بزرگتر از اجزایی است که توسط آنها ساخته میشود. گرشنفلد میگوید: وقتی یک جامبو جت میسازید، برای حمل قطعات آن نیاز به جمبو جت های دیگر دارید. با سیستمی مانند این که توسط رباتهای کوچک مونتاژ شدهاند، فرایند ساخت کارآمد و هوشمندانه است.
او میگوید به طور مشابه، در تولید یک خودروی جدید، قبل از اینکه اولین خودرو واقعاً ساخته شود، میتوانید یک سال را صرف آماده سازی ماشین آلات برای تولید کنید. سیستم جدید کل این فرآیند را دور می زند. چنین کارایی بالقوه ای دلیل همکاری نزدیک گرشنفلد و شاگردانش با شرکت های خودروسازی، شرکت های هواپیمایی و ناسا است. اما حتی صنعت ساخت و ساز ساختمان که به فناوری نسبتاً پایین تری نیاز دارد نیز می تواند به طور بالقوه از آن بهره مند شود.
در حالی که علاقه فزاینده ای به خانه هایی که با چاپ سه بعدی ساخته میشود وجود دارد، امروزه این خانه ها به ماشین آلات چاپی به اندازه یا بزرگتر از خانه در حال ساخت نیاز دارند. بنابراین پتانسیل چنین ساختارهایی که توسط انبوهی از روباتهای کوچک مونتاژ شوند، میتواند مزایایی را به همراه داشته باشد.
آژانس پروژه های تحقیقاتی پیشرفته دفاعی نیز برای ساخت سازه هایی برای حفاظت از ساحل در برابر فرسایش و افزایش سطح دریا علاقه مند است با این روش کار کند.