محققان دانشگاه کمبریج موفق به طراحی یک دست رباتیک با مصرف کم انرژی شدهاند که با کوچکترین حرکت در انگشتان میتواند اشیاء مختلف را بگیرد.
به گزارش تکناک، با استناد به مطالعهای در مجله Advanced Intelligent Systems منتشر شد، می توان گفت، این دست رباتیک با تکیه بر حرکات غیرفعال مچ دست و حسگرهای لمسی در پوست خود، قادر به انجام حرکات پیچیده است و این امر، راه را برای رباتیک کم هزینه و پر بازده با فعالیتهای طبیعی و سازگاری بیشتر هموار کرده است.

گرفتن اجسام با اشکال، اندازهها و بافتهای مختلف، چالش بزرگی برای رباتها به حساب میآید، اما محققان کمبریج با تمرکز بر حرکت غیرفعال، به راحتی این مشکل را حل کردهاند. آنها اعلام کردهاند که کنترل دست رباتیک جدید بسیار آسان است و به طور قابل توجهی کمترین میزان انرژی را نسبت به دستهای رباتیک (robotics : design, construction, operation, and application of robots) کاملاً موتوردار مصرف میکند.
انتظار می رود این دست رباتیک باعث بهبود توانایی گرفتن اجسام شود
دکتر توماس جورج توروتل، یکی از نویسندگان یک مطالعه در آزمایشگاه رباتیک پروفسور فومیا در دپارتمان مهندسی دانشگاه کمبریج، در حال توسعه راه حلهای بالقوه برای بهبود عملکرد رباتیک در گرفتن اجسام است. او اظهار داشت که نتایج آزمایشات قبلی نشان داده است که با حرکت دادن مچ دست، دامنه حرکت قابل توجهی در دست ربات به دست آمد.
دست رباتیک (شاخه علمی و مهندسی که به طراحی، ساخت، راهاندازی و استفاده از رُباتها میپردازد) پرینت سه بعدی مجهز به حسگرهای لمسی بود تا بتواند آنچه را که می گیرد حس کند. محققان بیش از 1200 آزمایش برای ارزیابی توانایی دست در گرفتن اشیا بدون انداختن آنها انجام دادند. این دست ابتدا با استفاده از توپهای پلاستیکی پرینت سه بعدی آموزش داده شد و در ادامه با موفقیت 11 مورد از 14 جسم مختلف، از جمله هلو، ماوس کامپیوتر و رول پلاستیک حباب دار را در دست گرفت.
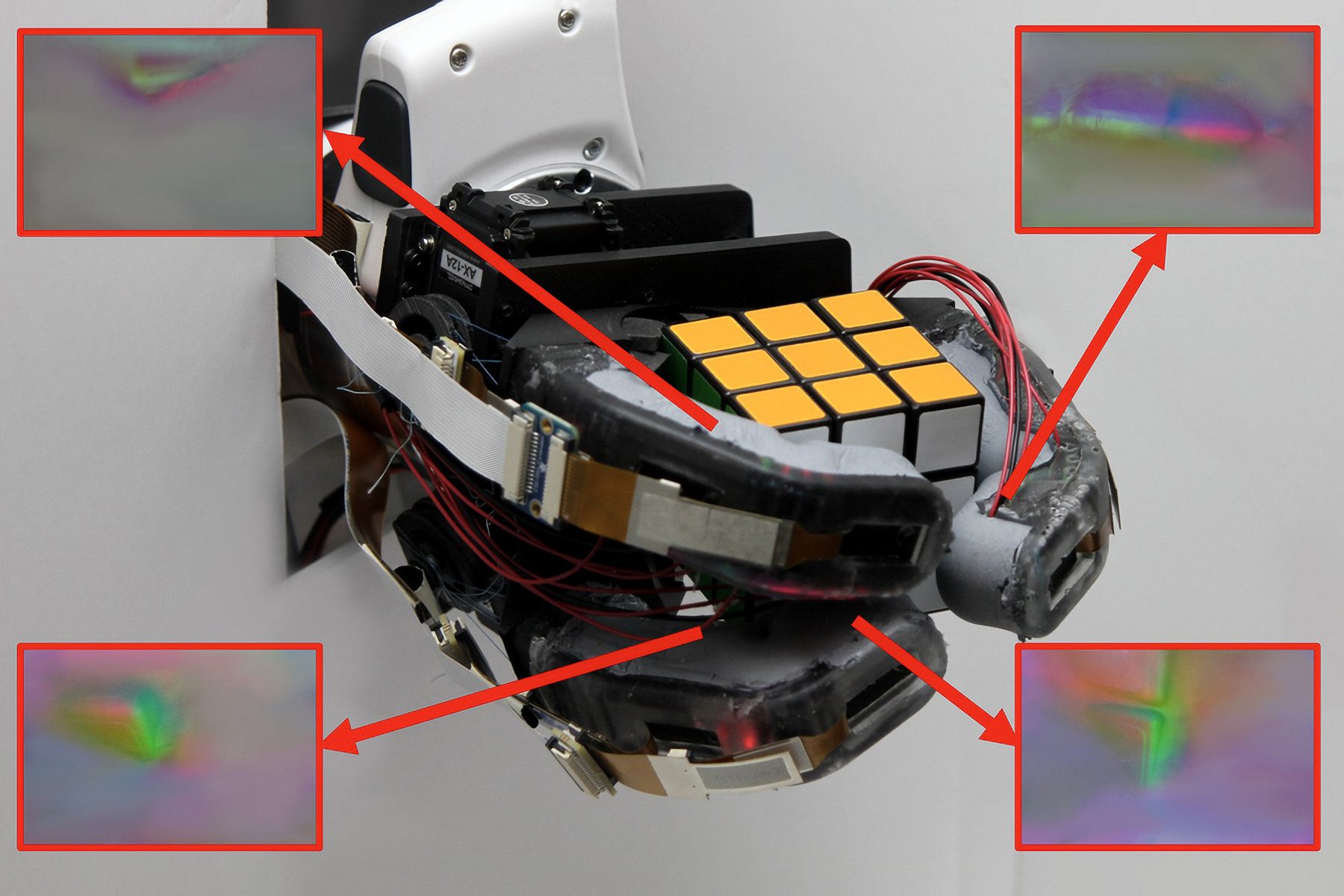
دکتر کایران گیلدی، نویسنده اصلی این مطالعه، در یک بیانیه برای رسانه ها در مورد دست رباتیکی توضیح داد که سنسورهای لمسی به ربات، امکان بهبود عملکرد گرفتن اشیا را می دهد. با استفاده از این سنسورها، دست ربات می تواند متوجه شود که فرایند گرفتن اجسام چقدر خوب پیش می رود و زمانی که جسم شروع به لغزش می کند را تشخیص داده و از افتادن جلوگیری کند.
به عبارت دیگر، جورج توروتل اظهار کرد که سنسورهای لمسی معادل پوست ربات هستند و فشار وارد شده به جسم را اندازه گیری می کنند. این اطلاعات به ربات کمک می کنند تا تخمینی از میزان نیروی لازم برای گرفتن هر جسم بیابد و در نتیجه بهبود عملکرد ربات در گرفتن اجسام را ممکن کنند.
طراحی غیرفعال دست رباتیکی است که توسط کمبریج توسعه یافته و تنها دارای تعداد کمی سنسور است. با این حال، این طراحی باعث سهولت در فرایند کنترل، دامنه وسیعی از حرکت و سادگی در فرآیند یادگیری میشود.
پیشرفتهای آتی میتواند شامل یکپارچهسازی قابلیتهای بینایی کامپیوتری و آموزش به ربات برای بهرهبرداری از محیط خود باشد، که به ربات امکان میدهد طیف وسیعتری از اشیاء را درک کند.
تیم پژوهشی در حال حاضر در تلاش است تا دقت و سرعت دست ربات را بهبود بخشد و کاربردهای جدید این فناوری را بررسی کند. آنها همچنین در حال توسعه نسخه پیشرفتهتری از دست هستند که میتواند تغییرات محیطی مانند دما یا رطوبت را حس کرده و به آن پاسخ دهد.